รายงานความคืบหน้าครั้งที่ 2 68340700411 แพร่พร้อมพงศ์ ยานะวิน
หน้าที่ได้รับมอบหมาย: การสร้างแผนที่เสมือนและระบุตำแหน่งบล็อกปัจจุบันของหุ่นยนต์ สรุปความคืบหน้าสำคัญ
หน้าที่ได้รับมอบหมาย: การสร้างแผนที่เสมือนและระบุตำแหน่งบล็อกปัจจุบันของหุ่นยนต์ สรุปความคืบหน้าสำคัญ
การส่งข้อมูลตำแหน่งหุ่นยนต์ผ่าน MQTT จากครั้งก่อนหน้าเราได้รับข้อมูลตำแหน่งของหุ่นมาในรูปแบบ ros masage เพื่อให้สามารถส่งต่อข้อมูลเหล่านี้ไปยังโมดูลอื่นที่ไม่ใช่ ros ได้ จึงเลือกส่งข้อมูลผ่าน mqttขั้นตอนการทำมีดังนี้ State ของหุ่นยนต์ ประกอบไปด้วย 3 สเตท แต่ละสเตทหุ่นจะทำงานต่างกันดังนี้ ตัวอย่าง ให้ stop = true สเตทจะเข้าสู่ STOP ให้ solve = true สเตทจะเข้าสู่ SOLVE เมื่อ current grid (x, y) = …
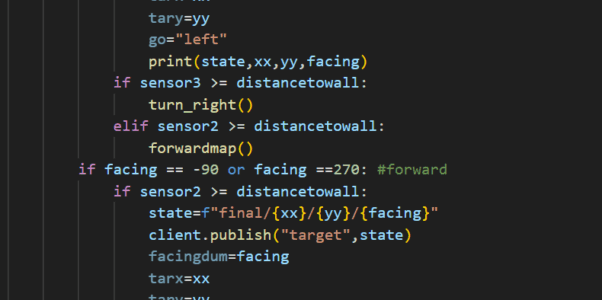
1. Python ทำสร้างฟังก์ชันเพื่อลดความยาวของโปรแกรมลงและได้เพิ่มเติมโปรแกรมในส่วนของการตรวจจับทางออกในระหว่างสำรวจแผนที่ด้วยฟังก์ชัน If-else โดยจะทำการแบ่งแผนที่ออกเป็นตาราง10×10 เมื่อมีการตรวจพบว่ารถอยู่ในตำแหน่งที่ x=0,9 หรือ y=0,9 จะใช้เงื่อนไขตรวจสอบพิเศษเช่น เมื่อหุ่นกำลังหัน0องศาที่y=0 หากไม่พบกำแพงทางซ้ายแสดงว่าช่องที่รถอยู่คือช่องทางออกจากนั้นทำการจดจำตำแหน่ง มุมการหันและทิศของทางออก เมื่อถึงการเดินรอบที่2 หุ่นจำทำการเดินมาที่จุดทางออกแล้วหมุนตัวจนกว่ามุมการหันจะตรงกับมุมที่จำไว้จากนั้นทำการเลี้ยวไปในทิศทางที่ทางออกอยู่ 2.ตัวหุ่น ได้มีการเพิ่มLidarเข้าไปที่ตัวหุ่น แต่ตัวหุ่นประสบปัญหาคือstepper motor ไม่สามารถทำให้ตัวหุ่นเคลื่อนที่ได้จึงมีแผนที่จะเปลี่ยนไปใช้ DC motor แทน จึงจำเป็นจะต้องเปลี่ยนตัวโครง โดยเลือกใช้โครงของturtlebot และจากที่เราสามารถระบุตำแหน่งด้วย image processingได้ จึงได้แผนการcontrol ดังนี้ โดยจะมีการติดtagที่ตัวรถเพื่อให้สามารถระบุตำแหน่งจากกล้องได้หลังจากนั้นตัวopencv จะตรวจสอบว่าตอนนี้รถอยู่ที่ตำแหน่งใดของกล้องและจะคอยส่งตำแหน่งผ่าน mqttมาที่ตัวรถเป็นระยะ ๆ สิ่งที่ได้เรียนรู้จากการทำในครั้งนี้คือ …
หน้าที่ได้รับมอบหมาย: การสร้างแผนที่เสมือน ใช้ข้อมูลระยะระหว่างหุ่นยนต์และสิ่งกีดขวางเพื่อจำลอง Maze ในคอมพิวเตอร์ และระบุตำแหน่งบล็อกปัจจุบันของหุ่น ความคืบหน้าในขั้นตอนแรก : การทดสอบผ่านสาย USB เพื่อให้ง่ายต่อการทดสอบและพิสูจน์แนวคิด (Proof of Concept) ผมได้เริ่มต้นด้วยการเชื่อมต่อระบบผ่านสาย USB (Serial Port) ก่อนที่จะพัฒนาระบบให้เชื่อมต่อแบบไร้สาย (Wi-Fi) ซึ่งหุ่นยนต์ที่หลักที่ใช้โปรแกรมคือ M5stack Lidar Bot ขั้นตอนการดำเนินงาน: สรุป: ในขั้นตอนนี้ สามารถดึงข้อมูล Lidar จากหุ่นยนต์มายัง PC และสร้างโปรแกรม Visualization เพื่อแสดงผลแผนที่แบบ Real-time …
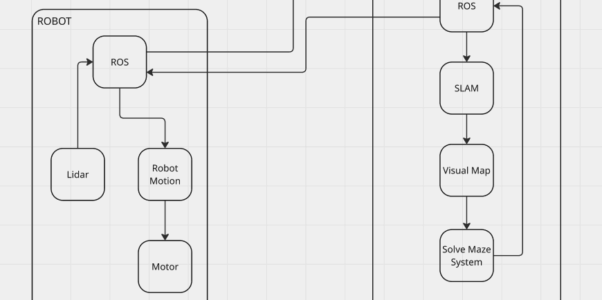
ในเฟสแรกของโครงการนี้ ผมชวยเรื่องการออกแบบระบบและการวางแผนการทำงานโดยรวม ของหุ่นยนต์แก้เส้นทาง (Solve Maze Robot) ซึ่งใช้ LidarBot2 เป็นแพลตฟอร์มหลัก ร่วมกับ ระบบ ROS (Robot Operating System) เพื่อรับข้อมูลจากเซนเซอร์ LiDAR และประมวลผลบนคอมพิวเตอร์ เป้าหมายของเฟสนี้คือ ภาพรวมแนวคิดการทำงานของระบบที่วางแผนไว้ หุ่นยนต์จะทำงานโดยใช้ข้อมูลจาก LiDAR Sensor เพื่อสแกนพื้นที่และส่งข้อมูลไปยังคอมพิวเตอร์ผ่านระบบ ROS สำหรับการประมวลผลแบบ SLAM (Simultaneous Localization and Mapping) เพื่อระบุพิกัดของหุ่นยนต์บนแผนที่ (XY Coordinates) และสร้างแผนที่จำลองของ …
การระบุตำแหน่งของหุ่นภายใน maze ในโมดูลการระบุตำแหน่งหุ่น จะรับข้อมูลข้อมูลจาก LiDAR และให้ผลลัพธ์ออกมาด้วยกัน 2 อย่าง คือ1. ตำแหน่งปัจจุบันของหุ่น ในรูปแบบของ grid x และ grid y เทียบกับตำแหน่งกริดเริ่มต้น คือ 0, 02. ทิศที่หุ่นหันไป เทียบกับทิศทางเริ่มต้น ณ ตอนเปิดเครื่องเพื่อตอบโจทย์ความต้องการ เราได้นำ ros2 มาใช้ในส่วนนี้ Data Flow Diagram ให้ Raspberry PI 5 รับข้อมูลจาก …
ในส่วนของผมจะทำหน้าที่การเขียนโปรแกรมแก้เขาวงกตและควบคุมหุ่นยนต์solve mazeซึ่งสิ่งที่ได้มีดังนี้ โปรแกรมจะสร้างเขาวงกตและจำลองการเดินของหุ่นโดยเมทริกซ์จะทำการหมุนตามการหันหัวของหุ่น เพื่อให้สามารถควบคุมหุ่นและรับข้อมูลจากได้ง่ายขึ้น และเมื่อมีคำสั่งsolve ก็จะทำการหมุนกลับมา ณ มุมเดิมเพื่อให้โปรแกรมสามารถแก้เขาวงกตได้ โดยการรับค่าคำสั่งจาก mqtt คำสั่งมีดังนี้ s เดินตรงไปข้างหน้า2จุด r เลี้ยวขวาพร้อมกับหมุนเมทริกทวนเข็ม90องศา l เลี้ยวซ้ายพร้อมกับหมุนเมทริกตามเข็ม 90องศา b กลับหลังพร้อมกับหมุนเมทริกไป180องศา solve เพื่อหาหาเส้นทางที่สั้นที่สุดจากตำแหน่งที่ได้กำหนดไว้ตอนแรก พร้อมกับระบุทิศที่ต้องไปเมื่อเจอทางแยก return เพื่อค้นหาเส้นทางกลับมาที่จุดเดิม โดยการย้อนลำดับ array แล้วสลับซ้ายเป็นขวา หรือ ขวาเป็นซ้าย 2.สร้างหุ่นยนต์ โดยหุ่นยนต์ที่ใช้จะเป็นหุ่นยนต์ที่สร้างขึ้นโดยใช้ raspberry pi 5เป็นตัวคอยรับค่าจาก …
รายงานความคืบหน้าครั้งที่ 1 (จากเริ่มต้นจนถึงวันที่ 31/10/2025) Class Project (Solve Maze) เริ่มต้นได้ทำการศึกษา Hardware และ Software โดยรูปด้านล่างจะเป็นหุ่นยนต์ที่เราจะใช้ในการ solve maze Hardware list & Spec 1.Lidar Model EAI YDLIDAR X2 LiDAR range and speed: 8m @ 7Hz 2.Remote Control (MCU:M5Core) 3.Robot …
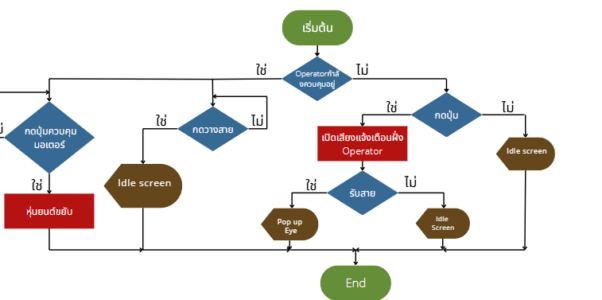
program design (flow chart) ฟังก์ชันการทำงานจะเป็นการที่ลูกค้ากดปุ่มเรียกOperator หากOperator รับสายก็จะ pop upลูกตาขึ้นเพื่อต่อสายพูดคุยกับลูกค้าพร้อมทั้งสามารถควบคุมการเคลื่อนไหวของหุ่นลักษณะ2DOF program design (DATA FLOW DIAGRAM) ฟังก์ชันของระบบจะทำงานโดยที่เว็บของฝั่งOperator จะเปิดและโปรแกรมของหุ่นยนต์จะทำงานตลอดเวลาเพื่อเป็นการสร้าง ROOM บน PeerJS เมื่อลูกค้ากดปุ่มRaspberry pi จะส่งข้อมูล ‘x’ ผ่าน mosquitto mqtt ไปยังเว็บของ operator เพื่อทำการแจ้งเตือนว่ามีลูกค้า หากOperator กด ON ก็จะทำการส่งข้อมูล ‘ON’ ผ่าน …
จาก Concept การใช้งานของหุ่น วิเคราห์โจทย์เพื่อออกแบบ การออกแบบให้หุ่นสามารถขยับหัวและลำตัวพร้อมกับการกระพริบตาได้ ช่วยสร้างประสบการณ์การโต้ตอบที่เป็นธรรมชาติและอบอุ่นยิ่งขึ้นต่อผู้ใช้งาน การเคลื่อนไหวของหัวและตัวทำให้ผู้ใช้รู้สึกว่าหุ่นมีชีวิต มีความตั้งใจฟัง และตอบสนองต่อสิ่งรอบข้างอย่างมีจิตใจ ขณะเดียวกัน การกระพริบตาเป็นองค์ประกอบเล็ก ๆ ที่ช่วยเสริมความสมจริง ลดความรู้สึกแข็งกระด้างของเครื่องจักร และทำให้ผู้ใช้รู้สึกสบายใจที่จะเข้าหา ในเชิงระบบ การทำให้หุ่นเคลื่อนไหวได้อย่างประสานต้องอาศัยการประมวลผลจากเซ็นเซอร์หลายตัวและระบบควบคุมที่แม่นยำ เพื่อให้การตอบสนองเป็นไปอย่างราบรื่นและสอดคล้องกับบริบทของการใช้งาน การเคลื่อนไหวเหล่านี้ไม่เพียงเพิ่มมิติทางอารมณ์ แต่ยังสะท้อนถึงความฉลาดของระบบที่สามารถเชื่อมโยงระหว่างการตรวจจับ การตัดสินใจ และการแสดงออกได้อย่างกลมกลืน ส่งผลให้ผู้ใช้งานรู้สึกถึงความเป็นมิตรและไว้วางใจในเทคโนโลยีมากขึ้น ภาพนี้แสดงรายละเอียดเชิงกลของหุ่นต้นแบบ โดยเน้นการออกแบบให้มีโครงสร้างที่เข้าใจง่าย และรองรับการทำงานของระบบต่าง ๆ ได้อย่างลงตัว ส่วนหัวของหุ่นได้รับการออกแบบให้ติดตั้งกล้องและไมโครโฟนไว้ด้านหน้า เพื่อให้สามารถตรวจจับภาพและเสียงได้อย่างมีประสิทธิภาพ เหมาะสำหรับการจดจำใบหน้า การสื่อสาร หรือการตอบสนองต่อเสียงของผู้ใช้งาน ด้านหน้าของหัวมีจุดยึดจอแสดงผล ซึ่งใช้สำหรับแสดงดวงตาหรืออารมณ์ของหุ่น …