Tag: Teleoperation

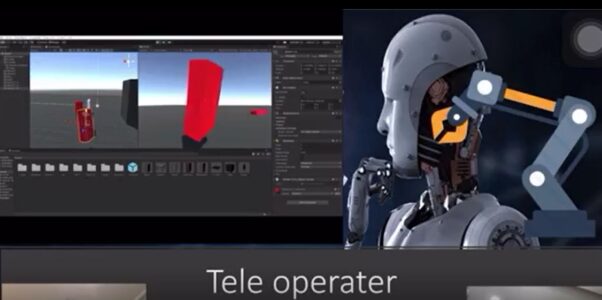
TeleRobot
ในการออกแบบโครงสร้างอาคารนั้นจะต้องคำนึงถึง การใช้งาน รูปแบบที่เป็นเอกลักษ์ และที่สำคัญที่สุดก็คือความปลอดภัยของโครงสร้างที่จะคอยรับมือกับเหตุการณ์ที่ไม่คาดคิดต่าง ๆ ในงานทางด้านสถาปัตยกรรมการออกแบบโครงสร้างนั้นจะต้องได้รับการทดสอบว่ามีความทนทานต่อเหตุการณ์แผ่นดินไหวหรือไม่ ผู้จัดทำจึงได้คิดที่จะศึกษาและพัฒนาโปรแกรมที่สามารถออกแบบและจำลองการเกิดแผ่นดินไหวได้ สมาชิกผู้จัดทำ นายธนภัทร อัศวนภานนท์ โรงเรียนกรุงเทพคริสเตียน นายสายฟ้า มีทอง โรงเรียนกรุงเทพคริสเตียน วัตถุประสงค์ เพื่อเป็นสื่อการเรียนการสอนในภาควิชาสถาปัตยกรรม ในการจำลองโครงสร้างพื้นฐานต่างๆ ในสถานการณ์แผ่นดินไหว ใช้เป็นสื่อการสอนพื้นฐานสำหรับเยาวชนที่สนใจในเรื่องโครงสร้างและการออกแบบอาคารได้ทดลองและศึกษาผ่านทางโปรแกรม ภาพรวมของการทำงาน ใช้ MQTT Dashboard ส่งข้อมูลไปที่ MQTT cloud และส่งต่อไปยังคอมพิวเตอร์เพื่อควบคุมโปรแกรม Unity การนำเสนอผลการออกแบบ Flow Chart ของระบบ ตัวอย่างโค้ดที่ใช้เขียน ผลการทดลอง Tele …
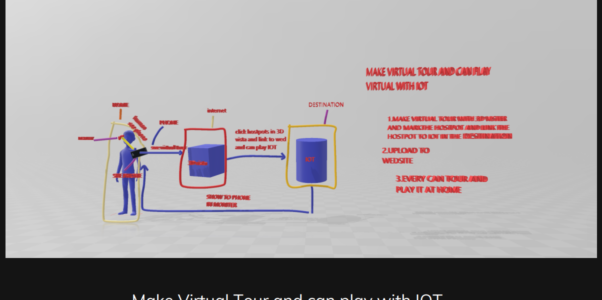
Virtual Tour
สมาชิก ณัฐภัทร งามสมพงษ์กำลังศึกษามัธยมศึกษาปีที่ 5 โรงเรียนเตรียมอุดมศึกษาพัฒนาการ รัชดา พีรัชชัย เเช่มวงษ์กำลังศึกษามัธยมศึกษาปีที่ 5 โรงเรียนบางปะกอกวิทยาคม เพิ่มเติม อ่านข้อมูลเพิ่มใน github ของผู้ออกแบบและพัฒนาระบบที่นี่ [Link]