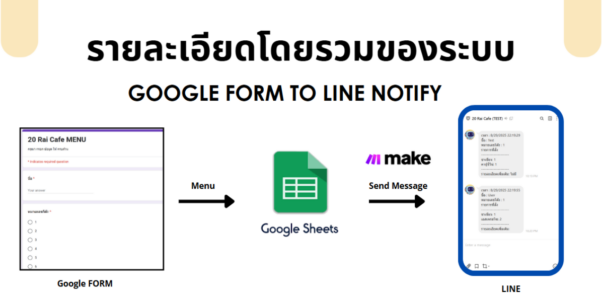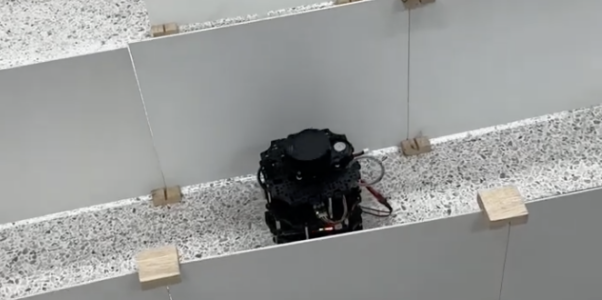
รายละเอียดโดยรวมของระบบ
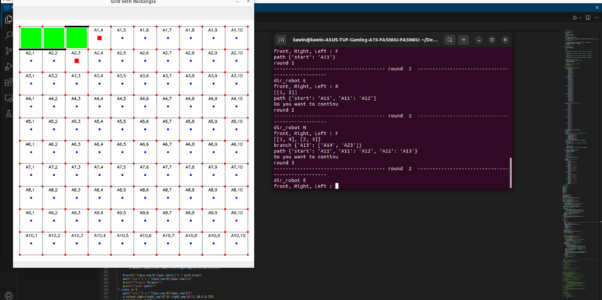
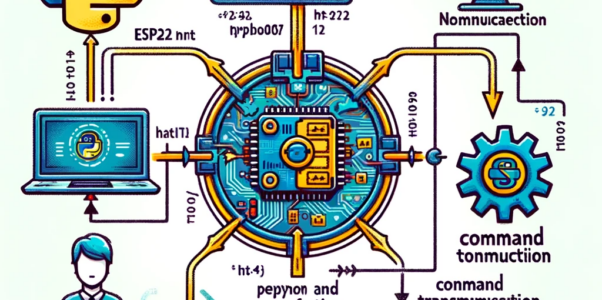
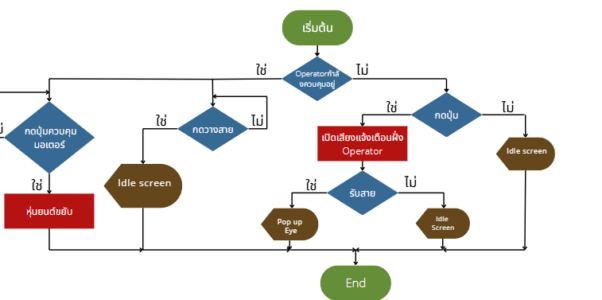
program design (flow chart) ฟังก์ชันการทำงานจะเป็นการที่ลูกค้ากดปุ่มเรียกOperator หากOperator รับสายก็จะ pop upลูกตาขึ้นเพื่อต่อสายพูดคุยกับลูกค้าพร้อมทั้งสามารถควบคุมการเคลื่อนไหวของหุ่นลักษณะ2DOF program design (DATA FLOW DIAGRAM) ฟังก์ชันของระบบจะทำงานโดยที่เว็บของฝั่งOperator จะเปิดและโปรแกรมของหุ่นยนต์จะทำงานตลอดเวลาเพื่อเป็นการสร้าง ROOM บน PeerJS เมื่อลูกค้ากดปุ่มRaspberry pi จะส่งข้อมูล ‘x’ ผ่าน mosquitto mqtt ไปยังเว็บของ operator เพื่อทำการแจ้งเตือนว่ามีลูกค้า หากOperator กด ON ก็จะทำการส่งข้อมูล ‘ON’ ผ่าน …