FRA500 : Human-Robotics Interface Class Project [ Put Your Hand Sign! ]
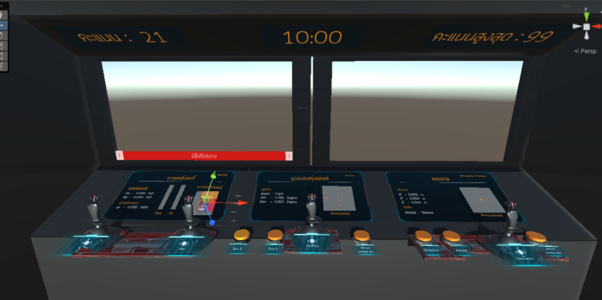
สมาชิกกลุ่ม นายธเนศพล หีบแก้ว รหัส 65340500027นายชยากร ชื่นประเสริฐ รหัส 66340500012 Put Your Hand Sign! เกมเกี่ยวกับการแข่งการออกแบบท่าทางต่างๆที่กำหนดให้ หรือกำหนดเองผ่านกล้อง webcam โดยมีการสื่อสารออกไปในรูปแบบของท่าทางต่างๆ รายละเอียดของเกม การเล่นถูกแบ่งออกเป็น 2 ฝ่าย โดยมีเป้าหมายคือการสร้างเงาให้ถูกต้อง และรวดเร็ว 1. ฝ่ายตั้งโจทย์ (The Challenger)สามารถเลือกการกำหนดเกมได้ 2 รูปแบบ: 2. ฝ่ายทำตาม (The Player) กติกาการเล่น VS Mode …