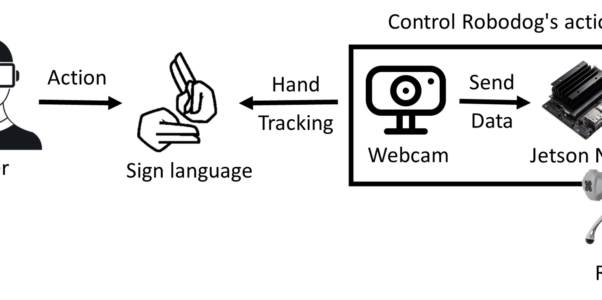
Class project : Control Robodog by Sign language
2/2566 FRA500/625 Human-Robotics Interface – narongrat.usir วัตถุประสงค์ System Scenario User แสดงท่าทางภาษามือ ไปที่ Webcam เพื่อ Hand tracking จากนั้น Webcam จะส่งท่าทางภาษามือ ไป Jetson Nano เพื่อแยกแยะว่าท่าทางภาษามือที่ส่งไปเป็นท่าอะไร จากนั้นก็จะควบคุม Robodog ให้ทำท่าทาง ตามภาษามือ ที่เรา Program ไว้ เก็บข้อมูลท่าภาษามือจากการเยี่ยมโรงเรียนโสตศึกษาทุ่งมหาเมฆ ได้ไปสำรวจ User (บุคคลพิการการได้ยิน) เพื่อเก็บข้อมูลลักษณะท่าทางของภาษามือที่จะนำมาใช้ในการสั่ง Robodog …

