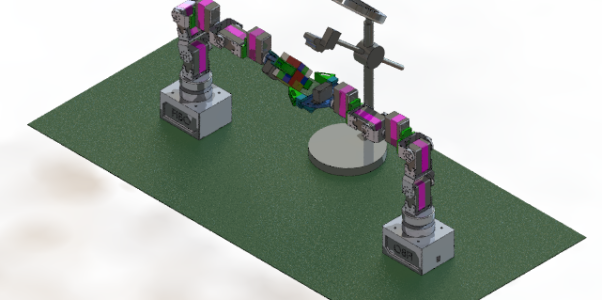
Robot Arm solve Rubik’s Cube
Objectives System Scenario System Overview Design DH parameter & Forward kinematics & inverse kinematics ทำ Homogenous Transformation เพื่อทำ transformation matrix ในการหา Forward kinematics Transformation matrix หลังจากที่ทำTransformation matrix จะได้ ค่า Forward kinematics เป็น T6 จากนั้นนำผลลัพธ์นี้แทนค่า theta …