บันทึกการปฎิบัติงานประจำวัน โครงการ 2B-KMUTT รุ่นที่ 19 โดย ปุณณะ เขมะสิงคิ
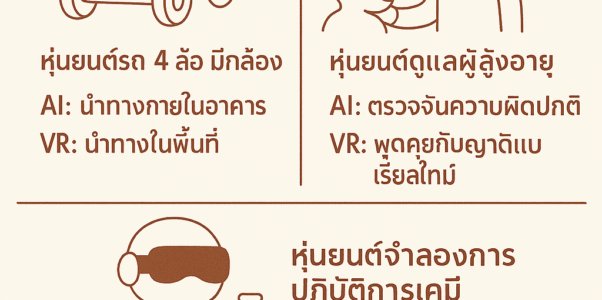
Brainstorm นวัตกรรมล้ำยุค (19/3/2025 ) ในการระดมสมองวันแรก เราได้คัดเลือกไอเดียที่น่าสนใจเกี่ยวกับการผสานเทคโนโลยี Robotics, AI และ VR เพื่อสร้างนวัตกรรมใหม่ที่สามารถใช้งานได้จริง หลังจากพิจารณาอย่างรอบคอบ สุดท้ายเหลือ 3 ไอเดียหลัก ได้แก่ 1. ระบบนำทางอัจฉริยะผ่าน VR และหุ่นยนต์ควบคุมระยะไกล ไอเดียนี้ออกแบบมาเพื่อช่วยให้ผู้คนสามารถสำรวจและเดินทางในสถานที่ที่ไม่คุ้นเคย โดยใช้ VR และหุ่นยนต์นำทาง ผู้ใช้สามารถสวมใส่อุปกรณ์ VR เพื่อควบคุมหุ่นยนต์ให้สำรวจพื้นที่จริงแบบเรียลไทม์ ฟีเจอร์หลัก ได้แก่ – นำทางในอาคารขนาดใหญ่ เช่น ห้างสรรพสินค้า สนามบิน หรือโรงพยาบาล …