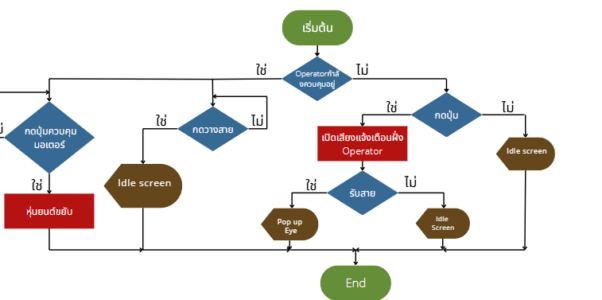
program design (flow chart)
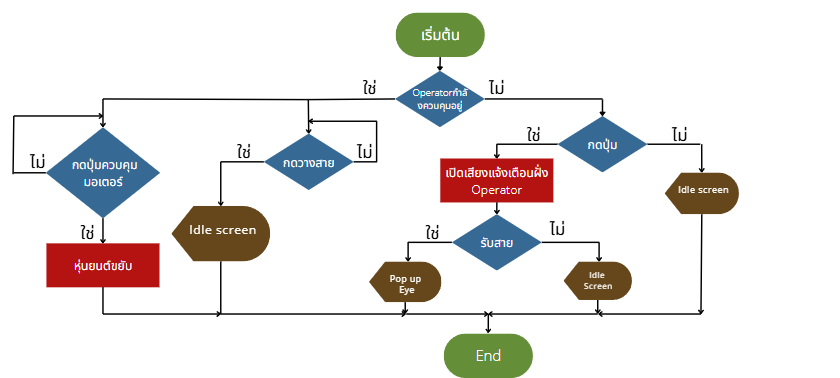
ฟังก์ชันการทำงานจะเป็นการที่ลูกค้ากดปุ่มเรียกOperator หากOperator รับสายก็จะ pop upลูกตาขึ้นเพื่อต่อสายพูดคุยกับลูกค้าพร้อมทั้งสามารถควบคุมการเคลื่อนไหวของหุ่นลักษณะ2DOF
program design (DATA FLOW DIAGRAM)
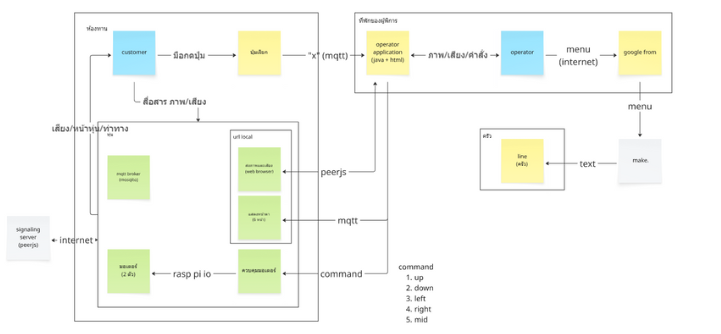
ฟังก์ชันของระบบจะทำงานโดยที่เว็บของฝั่งOperator จะเปิดและโปรแกรมของหุ่นยนต์จะทำงานตลอดเวลาเพื่อเป็นการสร้าง ROOM บน PeerJS เมื่อลูกค้ากดปุ่มRaspberry pi จะส่งข้อมูล ‘x’ ผ่าน mosquitto mqtt ไปยังเว็บของ operator เพื่อทำการแจ้งเตือนว่ามีลูกค้า หากOperator กด ON ก็จะทำการส่งข้อมูล ‘ON’ ผ่าน mqtt กลับไปยังRaspberry pi เพื่อเปิดเว็บลูกตาที่จะทำการ Joinห้องของPeerJS ที่ operatorสร้างไว้ เพื่อพูดคุยกับลูกค้าซึ่งลูกค้าจำเห็นดวงตาและได้ยินเสียงของ Operator ที่แสดงผลในขณะที่ operator จะได้รับหน้าของลูกค้า หาก Operator กดปุ่มควบคุมลูกตา ก็จะส่งข้อมูล ‘Eyeup’,’Eyedown,’Eyeleft’,’Eyeright’,’Eyeclose’ หรือ ‘Eyecenter’ ไปยังRaspberry pi เพื่อทำการsimulate keyboard ในการกรอกลูกตา หรือกดปุ่มควบคุมมอเตอร์เพื่อทำการส่งข้อมูล ‘up’,down’,’left’,’right,’center’ เพื่อหมุนServo motor ไปจนกว่าจะถึงมุมที่กำหนด. Operator จะทำการบันทึกข้อมูลผ่าน Google form เพื่อส่งไปยังGoogle sheet และส่งออเดอร์ไปที่ไลน์เพื่อให้พ่อครัวหรือบาริสต้าดำเนินการต่อไป
หน้าเว็บของ Operator
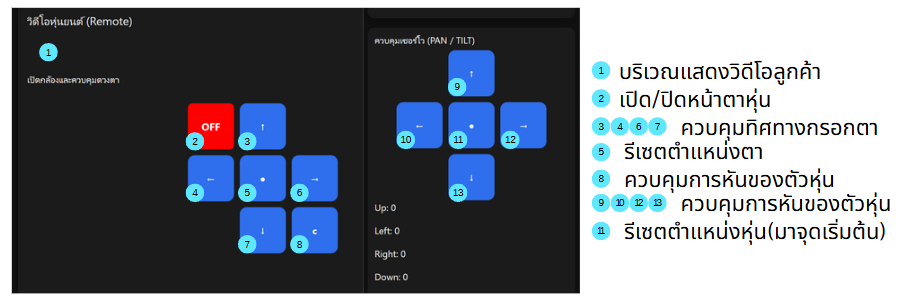
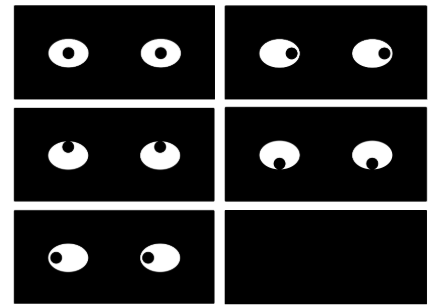
การแสดงผลดวงตาของหุ่นยนต์