FRA631 Foundataion of Robotics Class Project 68340700410 พัฒนรัตน์ จีดจีน
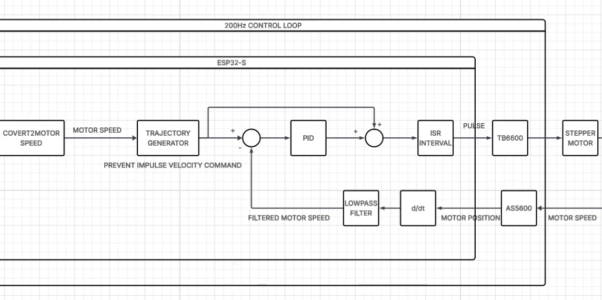
หน้าที่ : ควบคุม stepper motor โดยใช้ MKSSERVO42/57D ผ่าน CAN Protocal, ทำ closed loop stepper motor control และ wiring 1. การเรียนรู้ด้าน closed loop stepper motor control ในส่วนนี้คือการทำ closed loop stepper control เพื่อควบคุมความเร็วขึ้นมาเองโดยใช้ AS5600 และ TB6600 ซึ่งไม่ได้ลงลึกถึง …

![FRA500 : Human-Robotics Interface Class Project [ Put Your Hand Sign! ]](https://hcilab.net/wp-content/uploads/2026/05/image-46-602x300.png)