หน้าที่ได้รับมอบหมาย: การสร้างแผนที่เสมือนและระบุตำแหน่งบล็อกปัจจุบันของหุ่นยนต์
สรุปความคืบหน้าสำคัญ
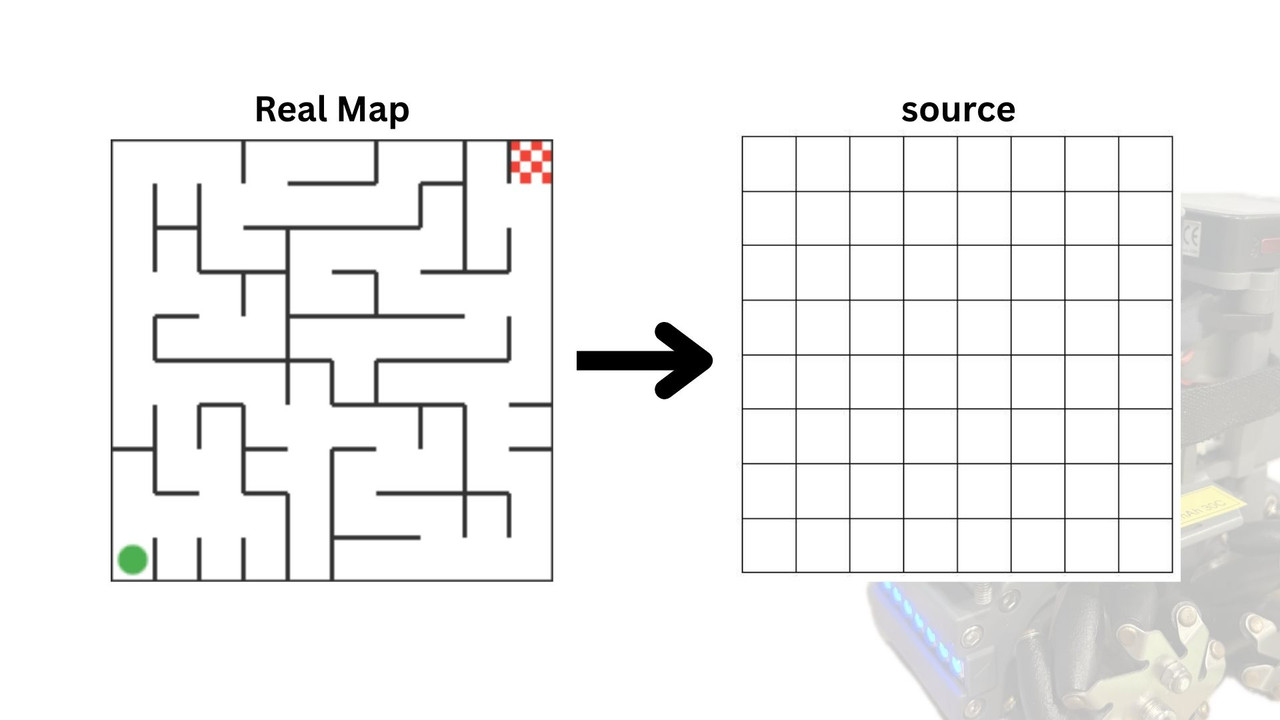
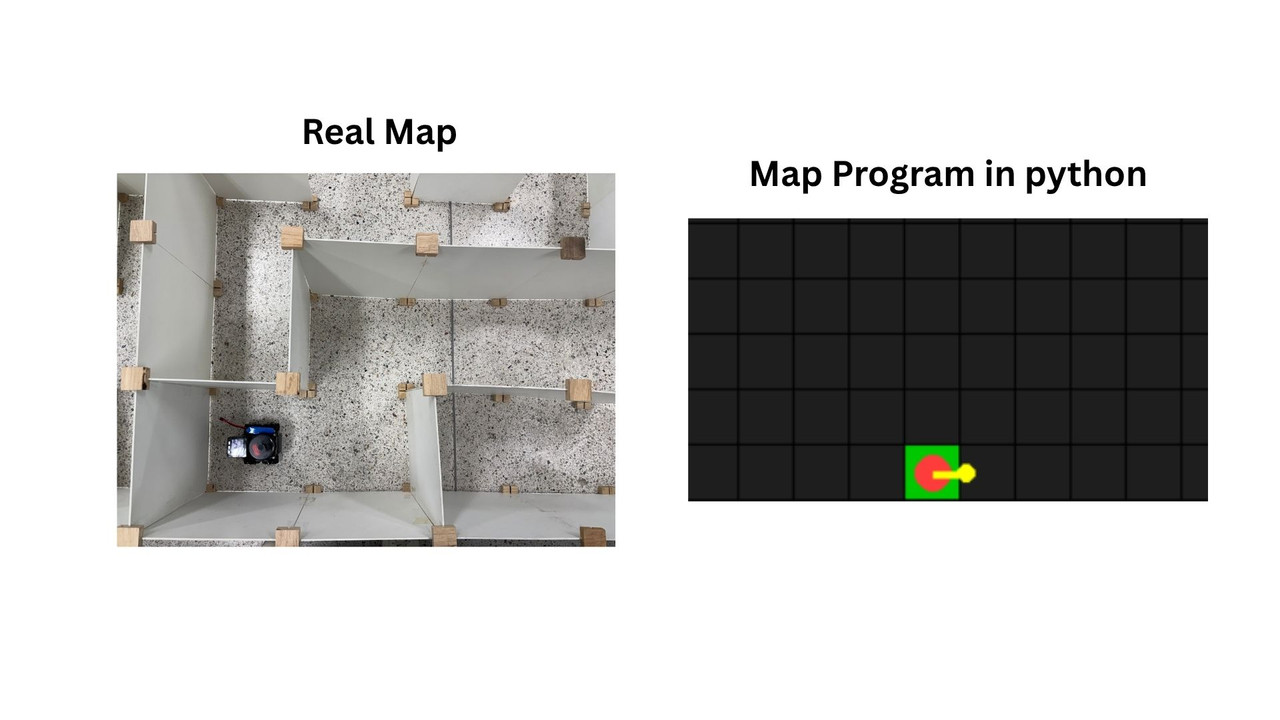
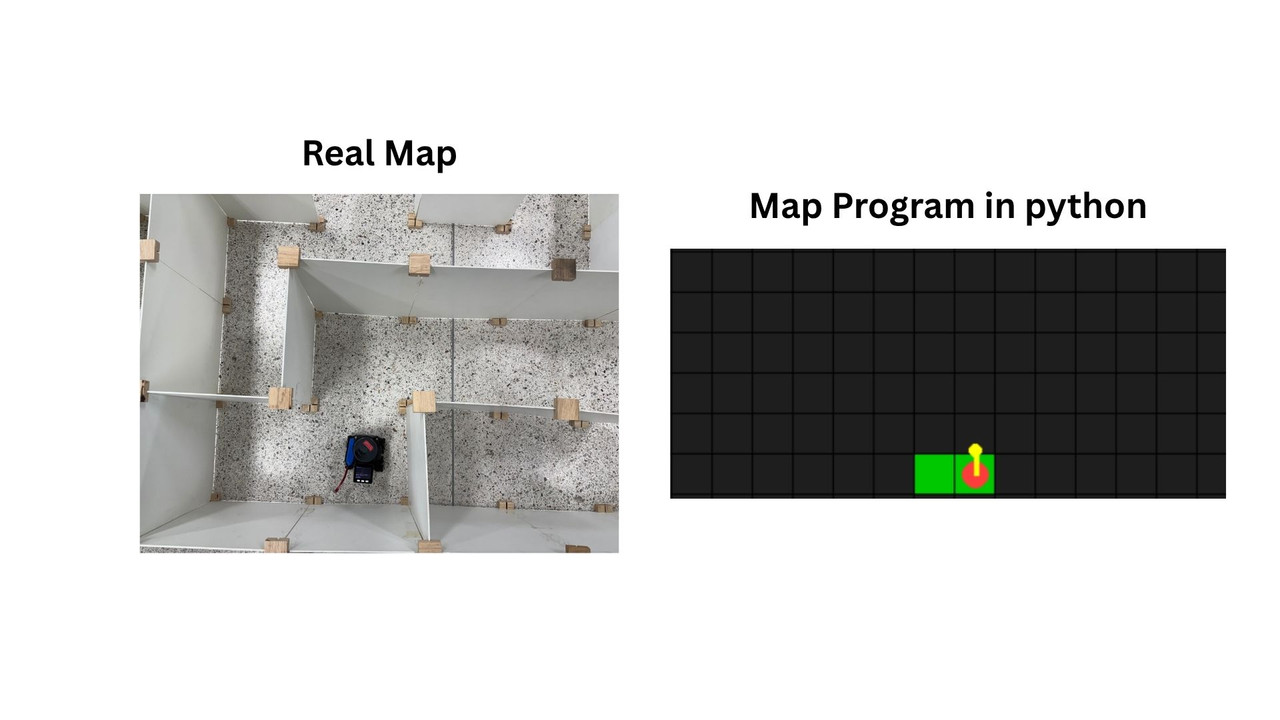
- การแปลงแผนที่ (Map Abstraction)
- มีการแปลง “แผนที่จริง” (Real Map) ซึ่งเป็นเขาวงกตที่สร้างขึ้นจริง หรือแผนผังเขาวงกตที่ซับซ้อน
- ไปเป็น “แผนที่เสมือน” (Source หรือ Map Program in python) ซึ่งอยู่ในรูปแบบของ ตารางกริด (Grid-based system) (ในภาพตัวอย่างคือ 8×8 ช่อง) (1-1)
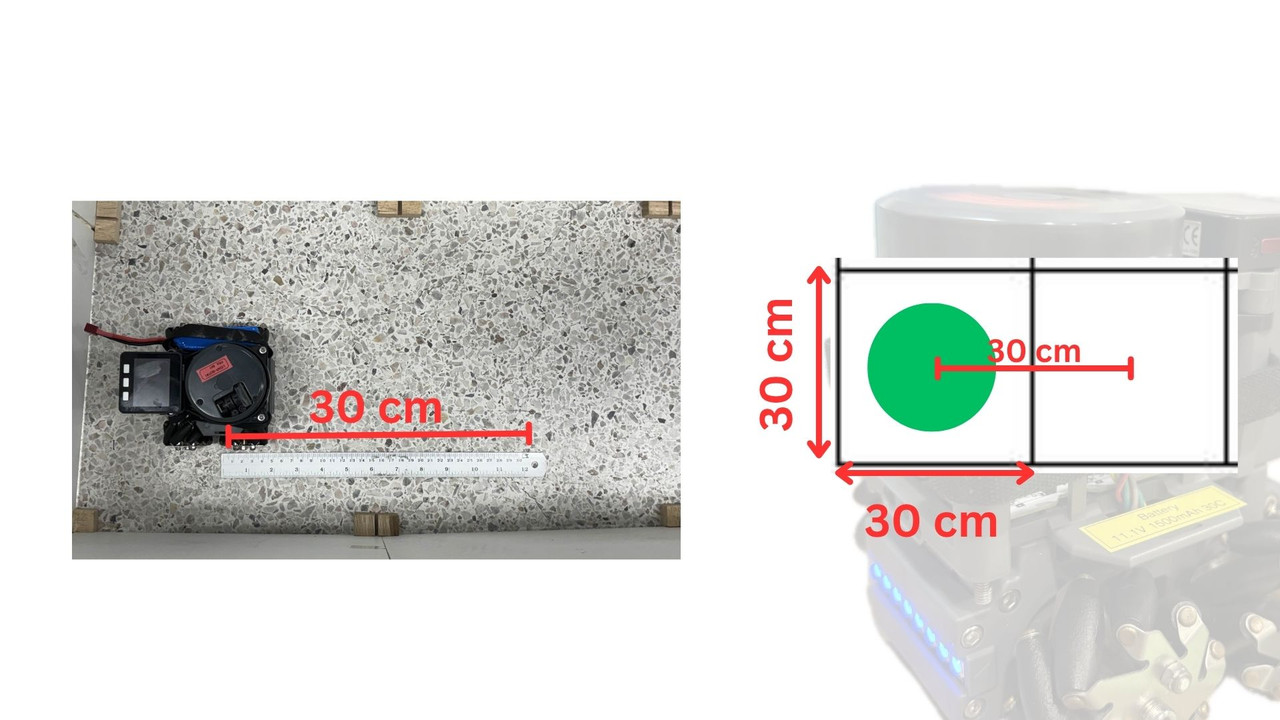
- การกำหนดมาตราส่วน (Scale Definition)
- มีการกำหนดมาตราส่วนที่ชัดเจนเพื่อเชื่อมโยงโลกจริงกับแผนที่เสมือน
- จากภาพ (1-2) ได้ข้อสรุปว่า 1 บล็อก (Grid) ในแผนที่เสมือน = 30 ซม. x 30 ซม. ในโลกจริง
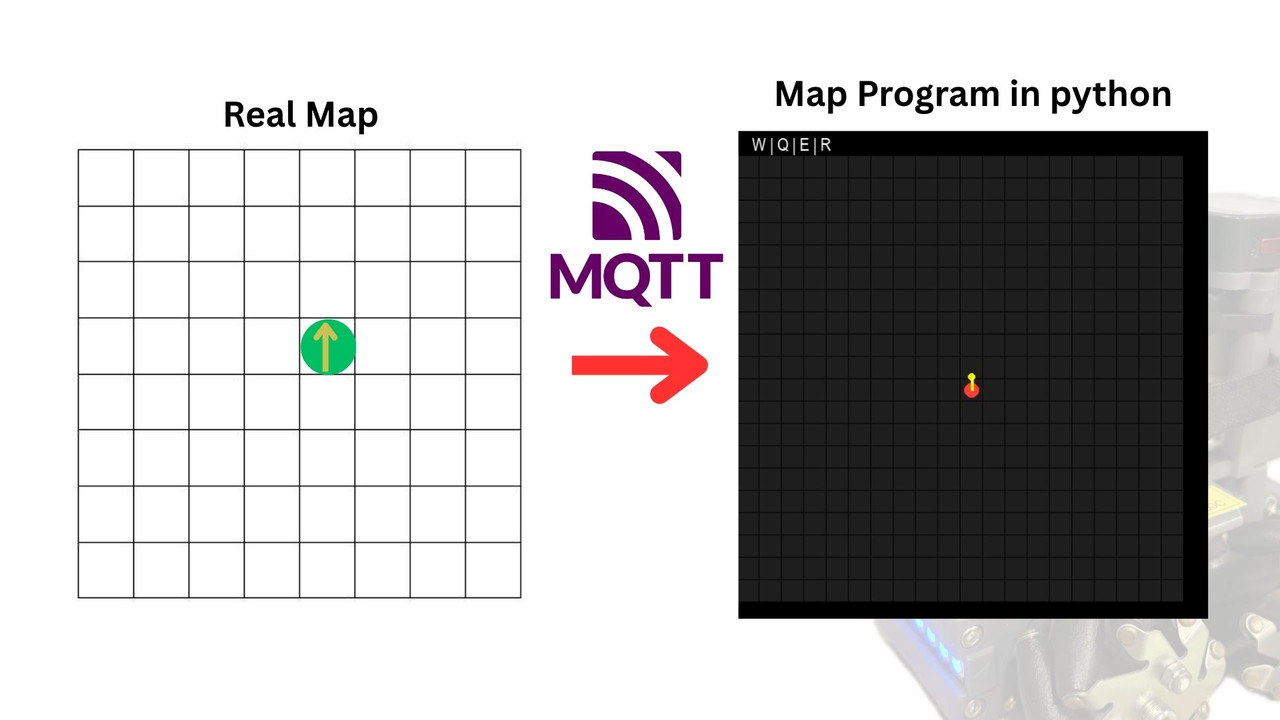
- การระบุตำแหน่ง (Position Tracking)
- โปรแกรม Python สามารถรับตำแหน่งและทิศทางของหุ่นยนต์จาก “แผนที่จริง” และนำมาแสดงผลบนตารางกริดเสมือนได้
- ในโปรแกรม Python หุ่นยนต์จะถูกแทนที่ด้วยบล็อกสีเขียว และมีสัญลักษณ์ (จุดสีเหลือง/ลูกศร) เพื่อบอกทิศทางที่หุ่นยนต์กำลังหันหน้าไป
- ช่องทางการสื่อสาร (Communication Protocol)
จากภาพ (1-3) ชี้ให้เห็นว่ามีการใช้ MQTT เป็นโปรโตคอลสื่อสารเพิ่มมาได้แล้วสำหรับการส่งข้อมูล