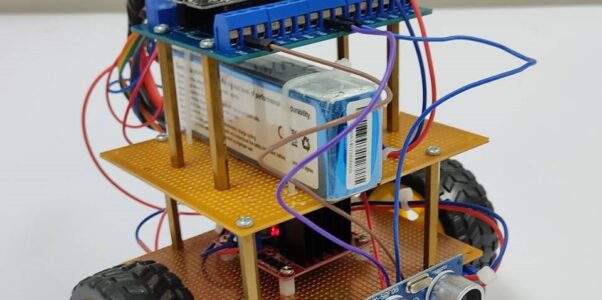
Class Project : Lidar bot for maze solving (3rd Group)
ผู้จัดทำ ขอบเขตงาน : 1.ออกแบบโปรแกรมสำหรับหุ่นยนต์สี่ล้อที่มีความสามารถสร้างแผนที่โดยใช้ Lidar 2.ตัวหุ่นยนต์ต้องสามารถหาทางออกจากเขาวงกตที่สั้นที่สุด 3.จะต้องมีการส่งข้อมูลระหว่างหุ่นยนต์(Lidar bot)และคอมพิวเตอร์(PC) ก่อนที่จะเข้าเนื้อหาของโปรเจคนี้ เพื่อให้เข้าใจภาพรวม จะต้องเข้าใจการใช้ Protocol ในการสื่อสารชนิด MQTT Picture Ref: https://mqtt.org/assets/img/mqtt-publish-subscribe.png หลักการทำงานของ MQTT จะประกอบไปด้วย 3 ส่วน ภาพรวมการทำงานร่วมกันระหว่างLow level (Lidar bot) และ High Level (PC) โดยใช้ MQTTเป็นตัวกลางในการสื่อสารในโปรเจคนี้ ตารางแสดง Task list …