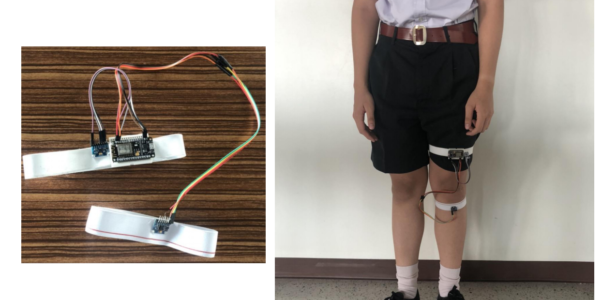
อุปกรณ์ช่วยบริหารสะโพก
สมาชิก ณรรฐสิทธิ์ บุญญกามะกำลังศึกษาอยู่ชั้นมัธยมศึกษาปีที่ 5 โรงเรียนเตรียมอุดมศึกษาพัฒนาการ รัชดา ณัฐมา อภิโชติเทวัญกำลังศึกษาอยู่ชั้นมัธยมศึกษาปีที่ 6 โรงเรียนราชินีบน มนพัทธ์ กลิ่นโพธิ์กำลังศึกษาอยู่ชั้นมัธยมศึกษาปีที่ 6 โรงเรียนบางประกอกวิทยาคม เพิ่มเติม อ่านข้อมูลเพิ่มใน github ของผู้ออกแบบและพัฒนาระบบที่นี่ [Link]