

ทำการศึกษาภาพรวมของหุ่นเพื่อที่จะนำมาทำให้สำเร็จตามวัตถุประสงค์
ซึ่งวัตถุประสงค์คือ เราจะมีการทำให้หุ่นยนต์ขับเคลื่อนเพื่อหาทางออกจากเขาวงกตโดยจะมีกระบวนการคิดว่าทางไหนคือทางออกและต้องวิ่ง 2 รอบเพื่อรอบแรกจะเป็นการเก็บแผนที่และรอบที่สองจะเป็นการวิ่งเพื่อหาทางออก เพื่อตัดสินใจว่าทางนี้คือทางที่ดีที่สุด และมีการสร้างแผนที่แบบเรียลไทม์แสดงพื้นที่ของเขาวงกตทั้งหมดและยังแสดงตำแหน่งของรถอย่างเรียลไทม์
ขอบเขตของงานนี้ ขนาดพื้นที่ของ 30 * 30 cm และ มีการคงทางเข้าและทางออกไว้แต่จะสามารถแก้ไขบล็อคภายในได้
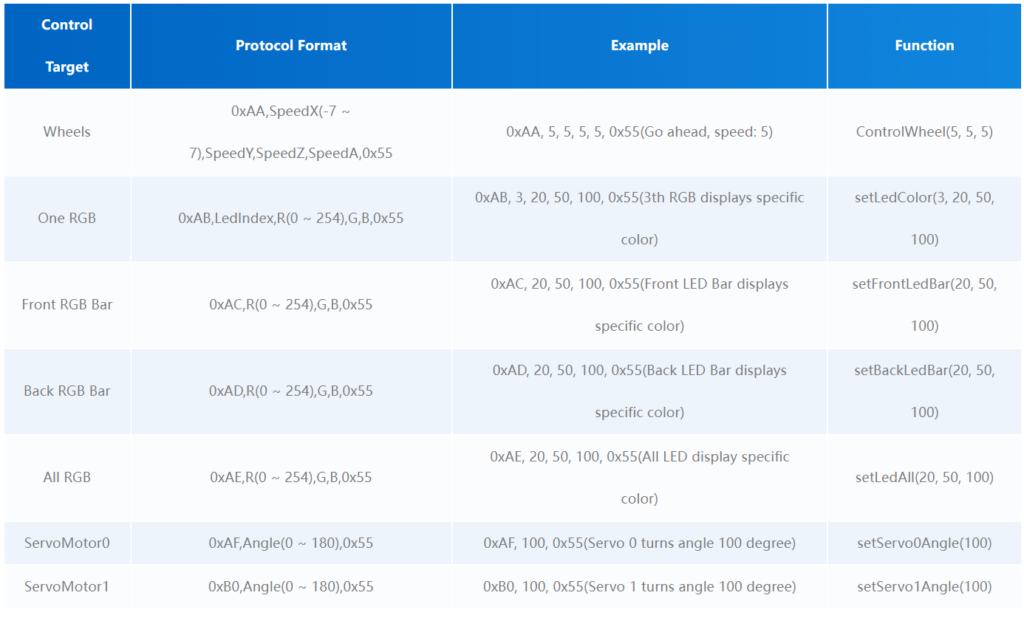
Parameter ของ M5stack_LidarBot v1
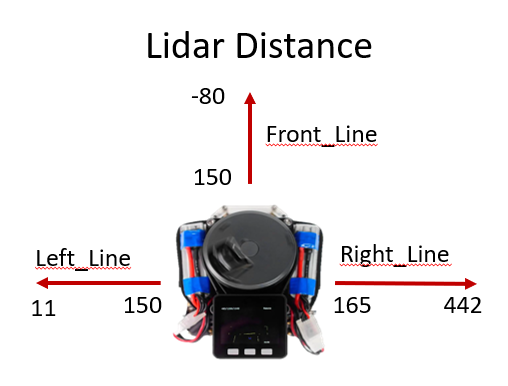
ระยะของ Lidar
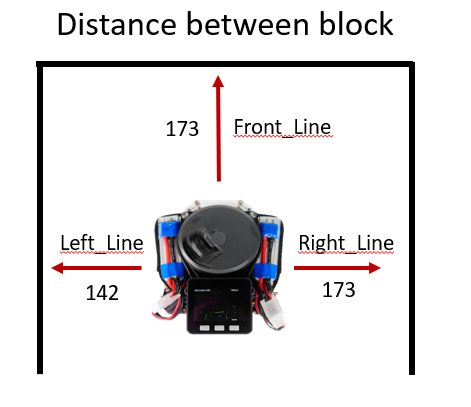
ระยะระหว่างกำแพงขนาด 30*30cm
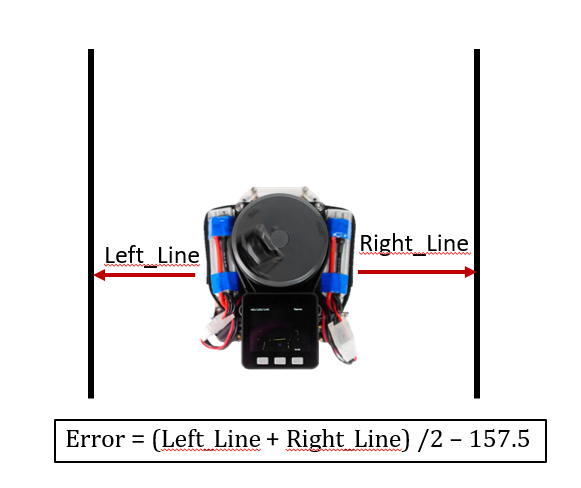
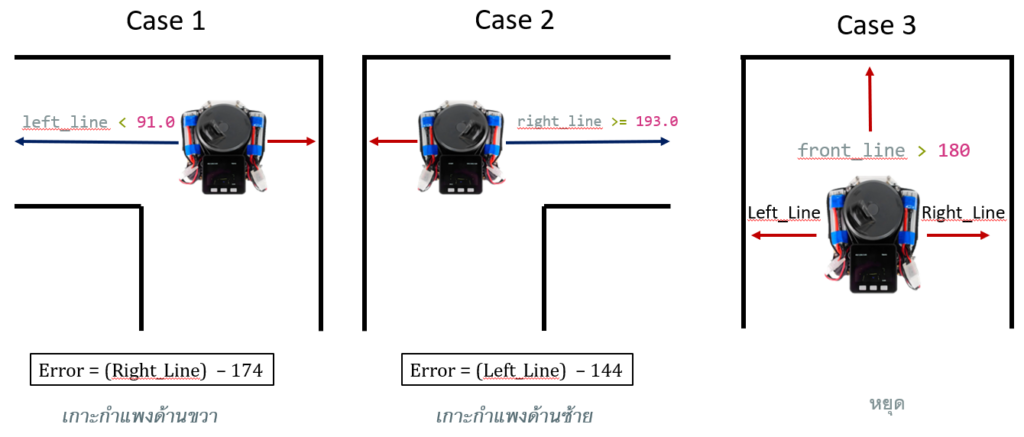
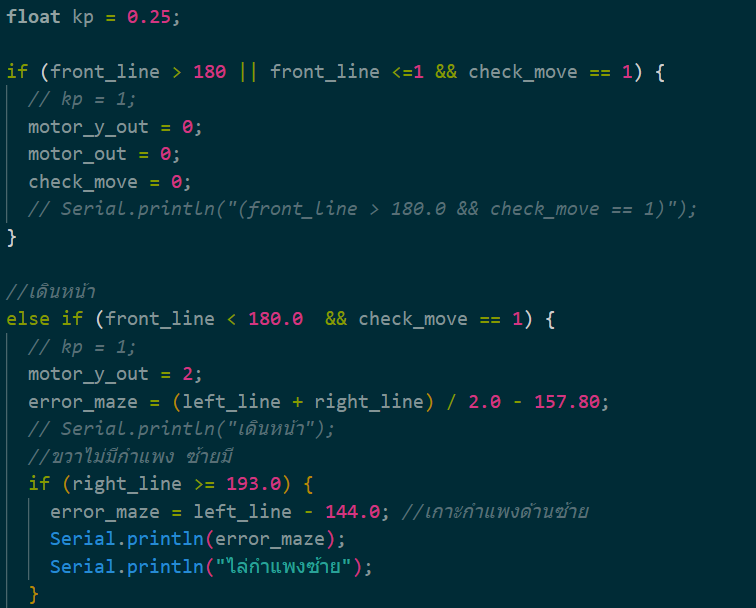
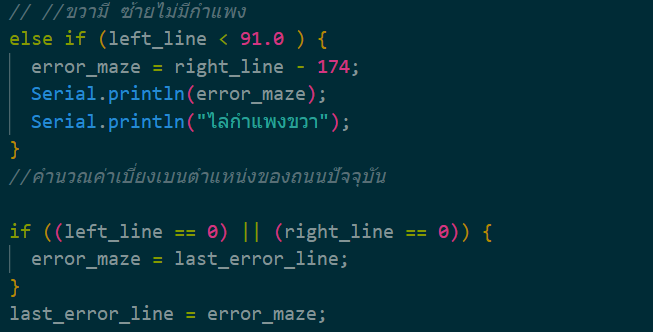
ในกรณีทางตรง
กรณีที่เจอในสนาม
Pingback: FRA641 Class project :Solved Maze – Human-Computer Interface Lab