

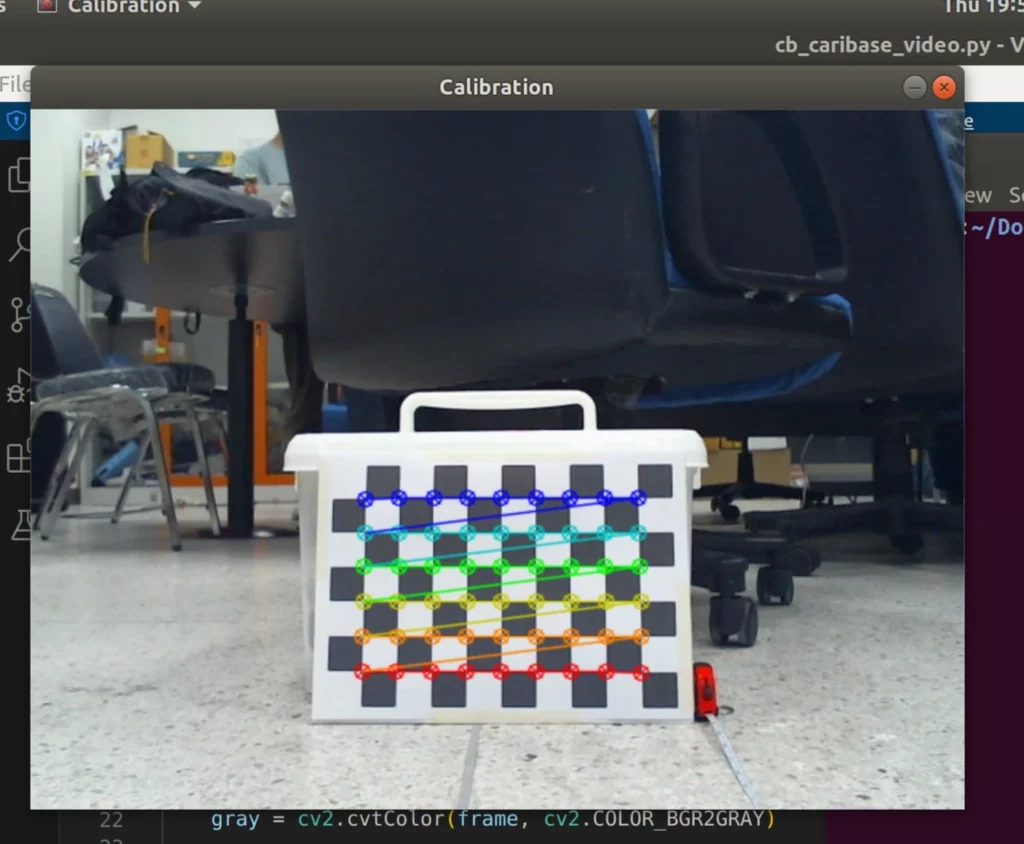
Camera Calibration เป็นกระบวนการที่ใช้ในการปรับแก้พารามิเตอร์ของกล้องเพื่อให้ระบบการถ่ายภาพนั้นมีความแม่นยำที่สูงสุด ระบบถ่ายภาพจะมีความแม่นยำในการแปลงจุดในโลก 3 มิติเป็นจุดในภาพ 2 มิติ เมื่อมีข้อมูลพื้นฐานเกี่ยวกับกล้อง เช่น ค่าโฟกัส (focal length) จุดกึ่งกลางทางแสง (optical center) และค่าสิ่งกีดขวางเลนส์ (distortion coefficients) ที่ถูกใช้แก้ไขความผิดพลาดที่เกิดจากเลนส์ของกล้อง

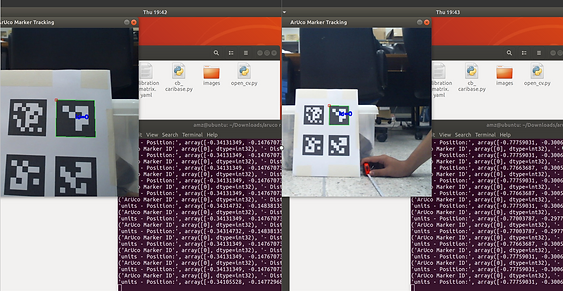
เมื่อได้ค่า cameraMatrix และ distCoeffs ที่ได้จากกระบวนการ camera calibration มีความสำคัญในการทำ ArUco Marker Tracking หรือการติดตาม ArUco Markers ด้วยกล้อง โดยมีหน้าที่ดังนี้:
cameraMatrix: เป็นเมทริกซ์ที่ใช้ในการแปลงจุดในโลก 3 มิติเป็นจุดในภาพ 2 มิติ ซึ่งระบบ ArUco Marker Tracking ต้องใช้ในการแปลงตำแหน่งของ ArUco Markers ในระบบพิกัดของกล้อง โดย cameraMatrix มีข้อมูลเกี่ยวกับค่าโฟกัส (focal length) และจุดกึ่งกลางทางแสง (optical center) ของกล้อง เพื่อคำนวณตำแหน่งของ ArUco Markers ในภาพ 2 มิติ
distCoeffs: เป็นพารามิเตอร์ที่ใช้ในการแก้ความผิดพลาดที่เกิดจากเลนส์ของกล้อง เนื่องจากเลนส์ของกล้องอาจทำให้เกิดความเบลอหรือความผิดพลาดที่ส่งผลต่อการตรวจจับ ArUco Markers จึงจำเป็นต้องใช้ distCoeffs เพื่อปรับปรุงตำแหน่งของ ArUco Markers ในภาพ 2 มิติให้ถูกต้อง
Pingback: Class project : ROBODOG – Human-Computer Interface Lab