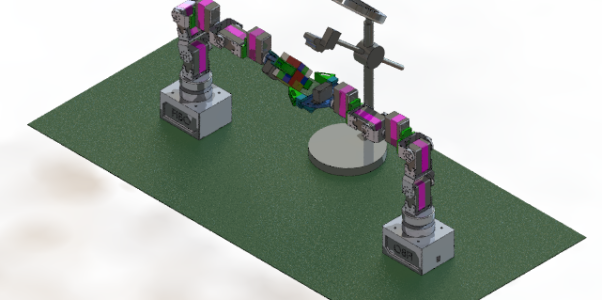
Class Project : Rubik solving by using machine vision and 2 units of 6 DOF serial robot (4th Group)
Members ธีรพจน์ แซ่ลิน64340700408 (Poj) กิตติพันธ์ เชษฐ์รัมย์65340700401 (Mek) ณัฐกร บัณฑิตขจร65340700404 (Sun) อาทิตย์ ศักดิ์สิทธิพิทักษ์65340700407 (Pia) Objectives 1. เพื่อศึกษาการประยุกต์ใช้ Forward and Inverse Kinematic (position) ในการควบคุมหุ่นยนต์ (Servo motor) 2. เพื่อศึกษาการประยุกต์ใช้ Velocity Analysis Jacobian and Trajectory Planning ในการควบคุมหุ่นยนต์ (Stepper motor) …