FRA641 Class project: ROBODOG
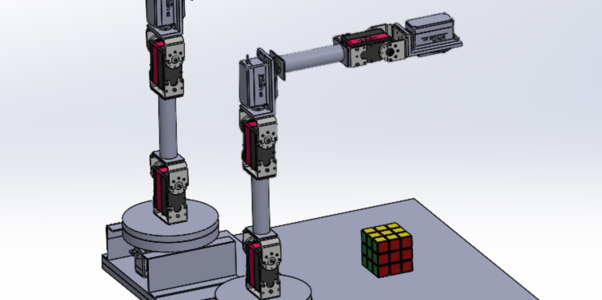
Project : A study and development project for legged robots with hand gesture recognition for wheelchair assistance Objective System Scenario System Data Flow หลักการทำงานของ ROBODOG ในการเขียนระบบควบคุมหุ่นยนต์ตัวนี้ จะเป็นการนำเอาระบบที่ทางบริษัทออกแบบการทำงานมาแล้ว ซึ่งเขาได้อำนวยความสะดวกให้ผู้พัฒนามือใหม่สามารถเข้าไปลองพัฒนาได้อย่างง่าย โดยจะแบ่งการควบคุมหุ่นตัวนี้ออกเป็น 2 ระดับ 1.LOWLEVEL 2.HIGHLEVEL Aruco Tracking Three …