Unity for Control UR5 Robot
Using Oculus quest 2 to control model in Unity and send command to control actual robot Software Blender Unity Video Demo Camera position Network Control Panel Video Final Future work Progress Planning
Using Oculus quest 2 to control model in Unity and send command to control actual robot Software Blender Unity Video Demo Camera position Network Control Panel Video Final Future work Progress Planning
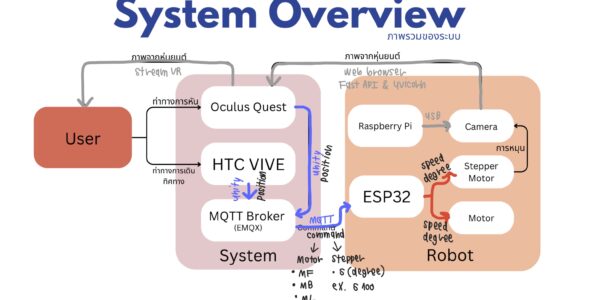
26/03/2024 วางแผนปรึกษาเรื่องโครงงาน ว่าใครมีหน้าที่อะไรบ้างเเละเเบ่งเป็นทีม ในส่วนของงานที่ได้รับมอบหมายคือ ส่วนของ Unity ฝั่งซอฟต์แวร์ แผนผังเเบบไม่ละเอียด ของหลักการทำงานของตัวระบบที่เราจะทำ (version 1) และได้มีการไปช่วยออกแบบตัวหุ่นยนต์เพิ่มเติมโดยได้เป็นรูปแบบดังนี้ 27/03/2024 วันนี้เป็นวันที่มีการวางแผนการทำงานที่ชัดเจนลงรายละเอียดหลักการทำงานมากขึ้น โดยทำเป็นแผนผังดังนี้ (version 2) โดยมีการเปลี่ยนการส่งรูปภาพเป็น Video รวมถึง WebRTC ได้มองเห็นภาพหน้าที่ของตัวเราในแผนผังที่ชัดเจนมากขึ้น โดยเป็นในส่วนของ การรับภาพจาก Webcam ให้ทำการโชว์ใน Unity โดยในช่วงวันแรกจะศึกษาข้อมูลโปรแกรม Unity เป็นหลัก เนื่องจากไม่เคยใช้งาน Unity เลยทำให้ใช้เวลาในการศึกษาค่อนข้างนานโดยกินเวลาทั้งวัน เว็บไซต์เกี่ยวกับพื้นฐานของ Unity …
day1 : brainstorming เรียนรู้เกี่ยวกับ HCI พวกเราพยายามมองให้กว้างโดยมองภาพรวมว่า HCI ในปัจจุบันถูกนั้นไปประยุกค์ใช้ในส่วนไหนบ้าง ทําให้พวกเห็นเห็นภาพเเละเข้าใจ HCL มากขึ้น จากนั้นภายในกลุ่มก็ช่วยกันมองหาปัญหาที่น่าสนใจ คิดหาวิธีเเก้โดยใช้เเนวคิด HCI day2 : process design and set up เมื่อ final ไอเดียกันเรียบร้อยเเล้ว พวกเราเริ่มคิดขบวนการทํางานในส่วนต่างๆ ทั้ง software เเละ hardware โดยเขียนออกเป็น flow chart การทํางาน ซึ่งสําหรับงานนี้จะเเบ่งเป็นสาน part …
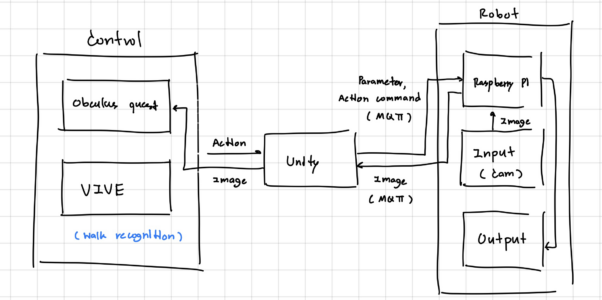
26/3/2024 Design of overall flow diagram The robot is control using VR consist of Obculus quest for controlling the movement of camera on robot and VIVE which tracking the action and movement of body for …
สวัสดีครับ ผม นายภูวเดช บัวผุด มาจากโครงการ 2B-KMUTT รุ่นที่ 18 กลุ่มวิจัย หุ่นยนต์เเละระบบอัตโนมัติ ใน Blog นี้จะเป็นการบันทึกการปฏิบัติงานประจําวันตลอดโครงงานวิจัยตลอด 2 สัปดาห์ วันจันทร์ที่ 25 มีนาคม พ.ศ.2567 จนถึง วันศุกร์ที่ 5 มีนาคม พ.ศ.2567 วันจันทร์ ที่ 25 มีนาคม พ.ศ.2567 วันนี้เป็นวันเเรกที่ผมได้เข้ามาที่ Lab ของ FIBO หรือ สถาบันวิทยาการหุ่นยนต์ภาคสนาม …
สวัสดีครับ ผม นาย พีรวิชญ์ ศิริเศรษฐ์ มาจากโครงการ 2B-KMUTT รุ่นที่ 18 กลุ่มวิจัย หุ่นยนต์เเละระบบอัตโนมัติ Blog นี้จะเป็นการบันทึกการปฏิบัติงานประจําวันตลอดโครงงานวิจัยตลอด 2 สัปดาห์ Canva Presentation : https://www.canva.com/design/DAGBXiAaJjE/yV_3ubdwFThpNmDWitx0Zw/edit วันที่ 25 มีนาคม 2567 วันนี้เป็นวันเเรกที่ผมได้เข้ามาที่ Lab ของ FIBO หรือ สถาบันวิทยาการหุ่นยนต์ภาคสนาม ได้เจอกับ อาจารย์ สยาม เเละพี่ๆนักวิจัยของ HCI LAB …
สวัสดีครับ ผม พนธกร เข็มหนู มาจากโครงการ 2B-KMUTT รุ่นที่ 18 อยู่ในกลุ่มที่ 2 หุ่นยนต์ ระบบอัติโนมัติ และเครื่องจักรกลผมและเพื่อนในกลุ่มอีก 6 คนได้จัดทำ TELE Robotic Operation with Virtual Reality หรือ ระบบควบคุมหุ่นยนต์จากระยะไกลด้วยเทคโนโลยีภาพเสมือนจริง ซึ่งจะเป็นการใช้ VR ในการควบคุมหุ่นยนต์จากระยะไกลได้ โดย Blog นี้จะเป็นการบันทึกการปฎิบัติงานประจำวันในการทำโครงงานวิจัยตลอดระยะเวลา 2 สัปดาห์ ระหว่างวันที่ 25 มีนาคม – …
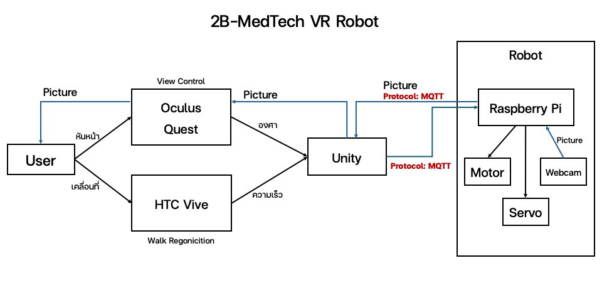
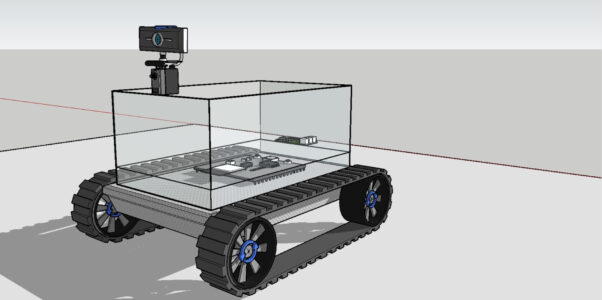
25/3/2024 เป็นวันแรกที่ได้เข้าแลปกลุ่มวิจัยหุ่นยนต์และระบบอัตโนมัติ ทำการหาข้อมูลเพื่อมาเสนอแนวคิดในการสร้างproject ซึ่งตัวprojectนั้นควรมีความสร้างสรรค์และเป็นประโยชน์แก่สังคม 26/3/2024 เมื่อได้ไอเดียถึงprojectที่จะทำเเล้วก็วางแผนออกแบบโครงสร้างของหุ่นยนต์ให้มีfunctionที่เหมาะสม เเละลิสต์อุปกรณ์ที่ต้องใช้ในการทำงานเพื่อวางแผนการซื้ออุปกรณ์ โดยprojectของเราเป็นหุ่นยนต์ส่งยาในโรงพยาบาล มี2prototypes prototype แรกจะเป็นกระบวนการของการเคลื่อนที่และส่งภาพของหุ่นยนต์โดยหุ่นยนต์จะเคลื่อนที่ตามคำสั่งของHTC Vive tracker ส่งภาพจากwebcamไปที่raspberry pi ให้ oculus quest และprototype ที่สองจะเป็นกระบวนการของการส่งยาจากเภสัชให้กับผู้ป่วยผ่านตัวหุ่นยนต์ แผนผังกระบวนการทำงานของproject เราเป็นดังภาพนี้ โครงสร้างของprojectเป็นดังภาพ 27/3/2024 ทำการออกแบบ 3D printในส่วนของชิ้นส่วนที่ใช้ในการบรรจุยา (prototype สอง) และช่วยในการต่อวงจร 28/3/2024 สั่งซื้ออุปกรณ์ที่ใช้ในการทำงาน ช่วยในกระบวนการต่อวงจร ทำการศึกษาเรื่อง web …
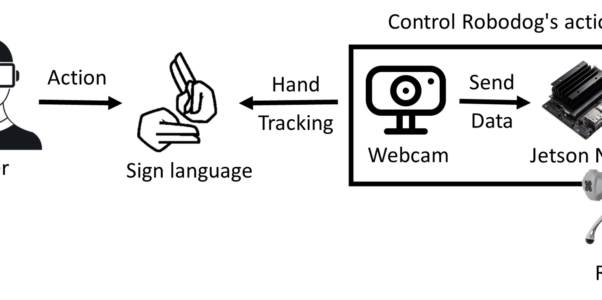
2/2566 FRA500/625 Human-Robotics Interface – narongrat.usir วัตถุประสงค์ System Scenario User แสดงท่าทางภาษามือ ไปที่ Webcam เพื่อ Hand tracking จากนั้น Webcam จะส่งท่าทางภาษามือ ไป Jetson Nano เพื่อแยกแยะว่าท่าทางภาษามือที่ส่งไปเป็นท่าอะไร จากนั้นก็จะควบคุม Robodog ให้ทำท่าทาง ตามภาษามือ ที่เรา Program ไว้ เก็บข้อมูลท่าภาษามือจากการเยี่ยมโรงเรียนโสตศึกษาทุ่งมหาเมฆ ได้ไปสำรวจ User (บุคคลพิการการได้ยิน) เพื่อเก็บข้อมูลลักษณะท่าทางของภาษามือที่จะนำมาใช้ในการสั่ง Robodog …
สมาชิกกลุ่ม 64340600417 นายณัฐวุฒิ หารสุโพธิ์ – Structure and Programming Design 64340700419 นายพลวัฒน์ เชิดศักดิ์สกุล – VR and User Interactive 64340600420 นายพิชามญชุ์ ทาดี – Inspecting Objects with Vision Camera 64340600421 นาย พิธา จิระภัทรศิลป – Robot Kinematics 64340700423 นายอัจชาณุวัฒน์ …