สมาชิกกลุ่ม

64340600417 นายณัฐวุฒิ หารสุโพธิ์ – Structure and Programming Design

64340700419 นายพลวัฒน์ เชิดศักดิ์สกุล – VR and User Interactive

64340600420 นายพิชามญชุ์ ทาดี – Inspecting Objects with Vision Camera

64340600421 นาย พิธา จิระภัทรศิลป – Robot Kinematics

64340700423 นายอัจชาณุวัฒน์ ลามา – Interactive Glove

64340700425 นายอุทัย ผลบุญ – Robot Gripper
ที่มาและความสำคัญ
เพื่อเป็นการนำองค์ความรู้ที่ได้เรียนจากรายวิชา FRA 631 Foundation of Robotics มาประยุกต์ใช้ในรูปแบบของการทำ AVATAR ROBOT โดยได้มีการออกให้ให้ Robot ทำหน้าที่ในการ Pick and Place ชิ้นงานที่ทางผู้จัดทำได้จัดเตรียมไว้ ซึ่งจะต้องมีการใช้ความรู้ในด้านการคำนวณ Kinematics, Trajectory Planning, Task Planning รวมถึงการนำเอาระบบ Vision เข้ามาประยุกต์ในการทำงานร่วมกับ Robot และมีการควบคุมจากระยะไกล เพื่อให้เป็น AVATAR ROBOT อย่างสมบูรณ์
วัตถุประสงค์ของโครงการ
- ออกแบบและพัฒนาระบบหุ่นยนต์ โดยใช้หุ่นยนต์ 2 ตัวทำงานร่วมกันกับระบบ Vision ที่มีการเชื่อมต่อข้อมูลระหว่างกัน
- เพื่อศึกษาการให้หุ่นยนต์ที่มีการทำงานเป็นรูปแบบตัวแทนมนุษย์ (Avatar) จากระยะไกล
- พัฒนาการทำงานของหุ่นยนต์ 2 ตัวให้สามารถทำงานร่วมกันในลักษณะ 2 แขน ที่ทำงานร่วมกัน
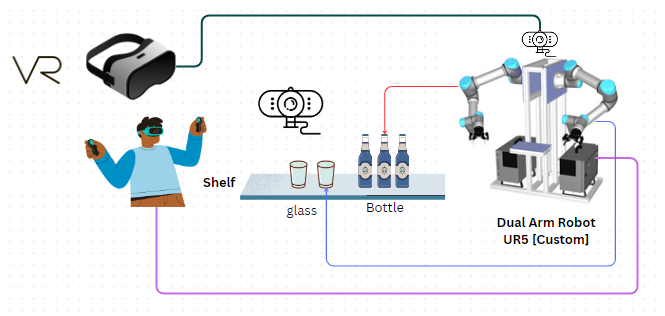
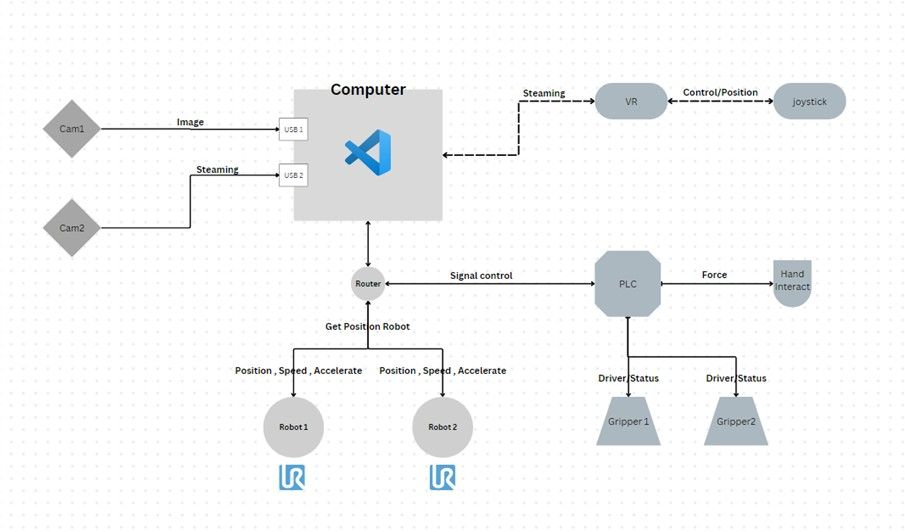
System Scenario
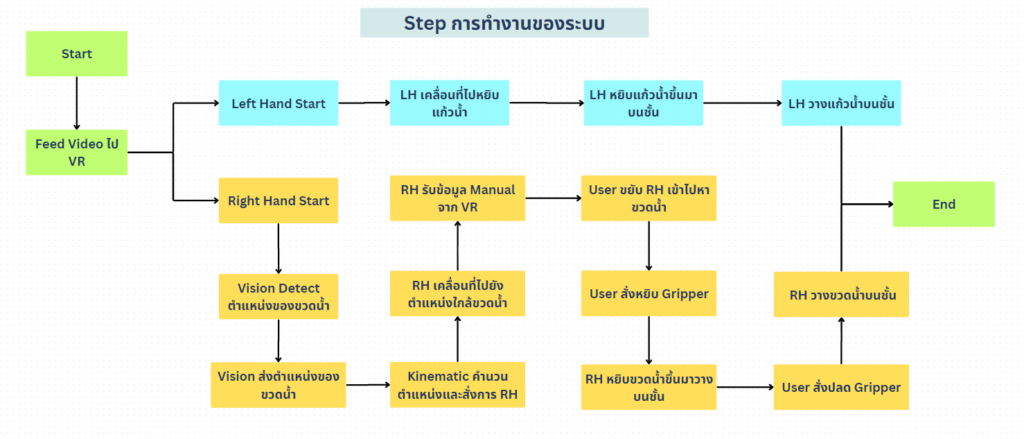
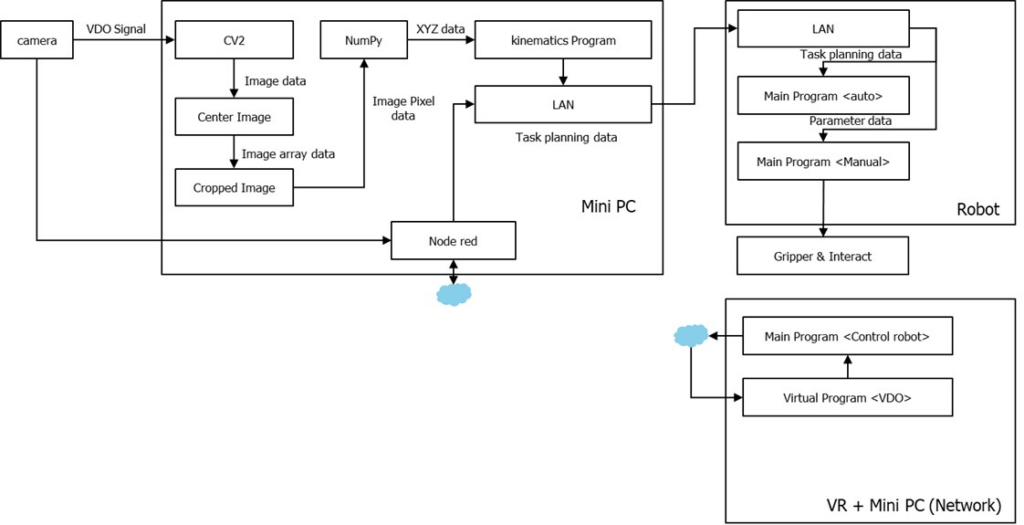
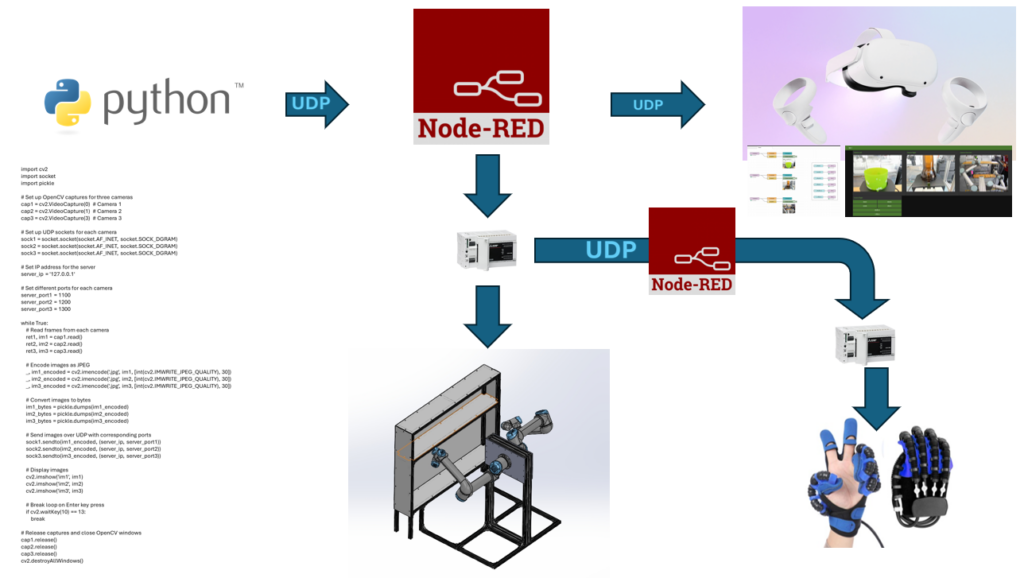
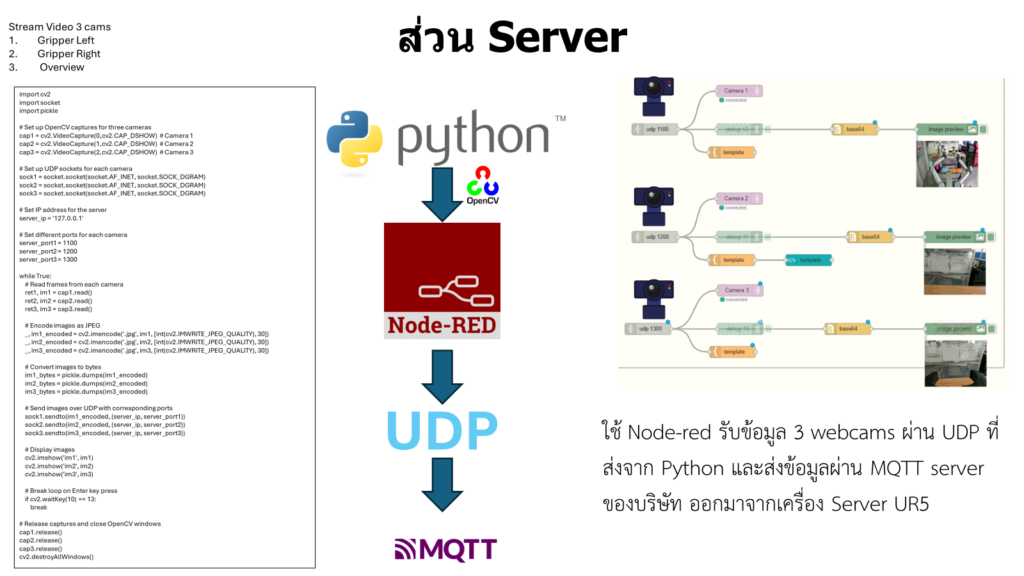
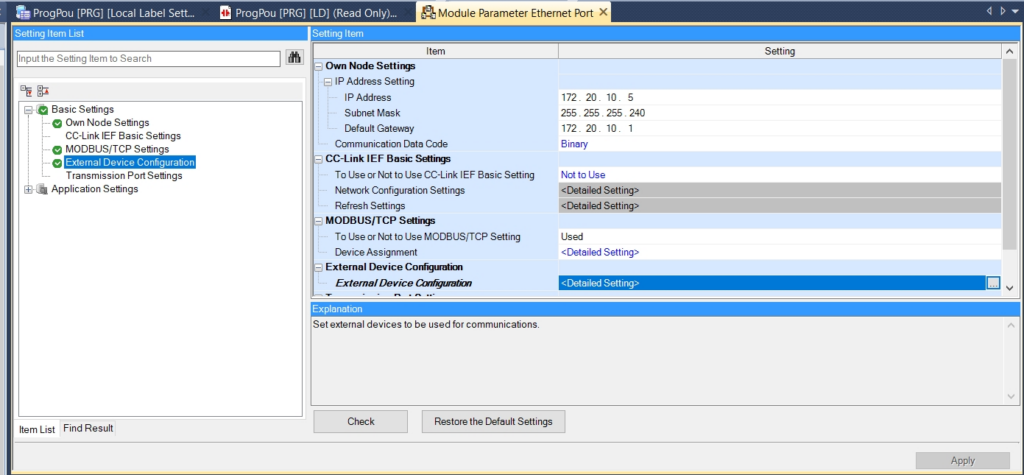
System Data Flow and Program Structure
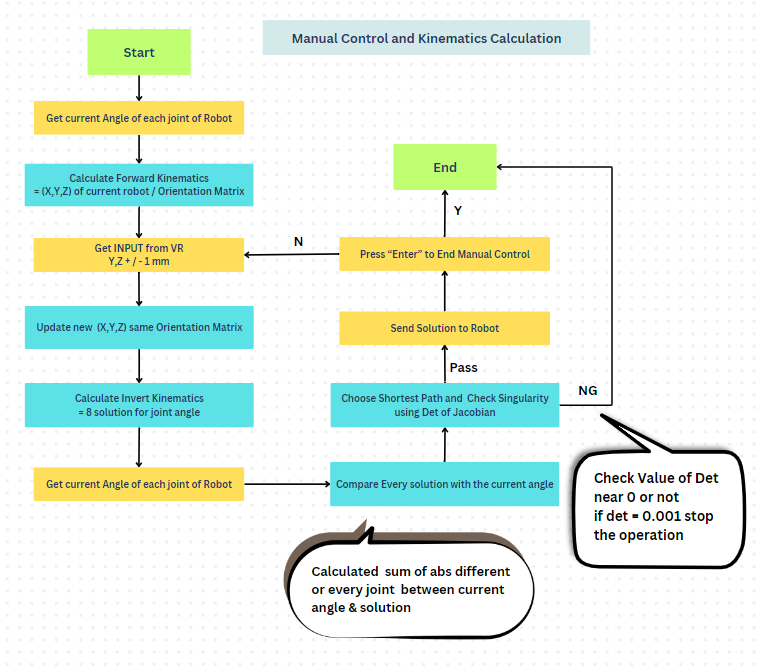
Kinematic and Manual Control
Detail Page : https://hcilab.net/uncategorized/2-hand-avatar-robot-kinematics/ – 64340600421 นาย พิธา จิระภัทรศิลป
Forward Kinematics
จาก DH Transformation เราจะได้ตัวแปร a, d, alpha, theta ดังนี้
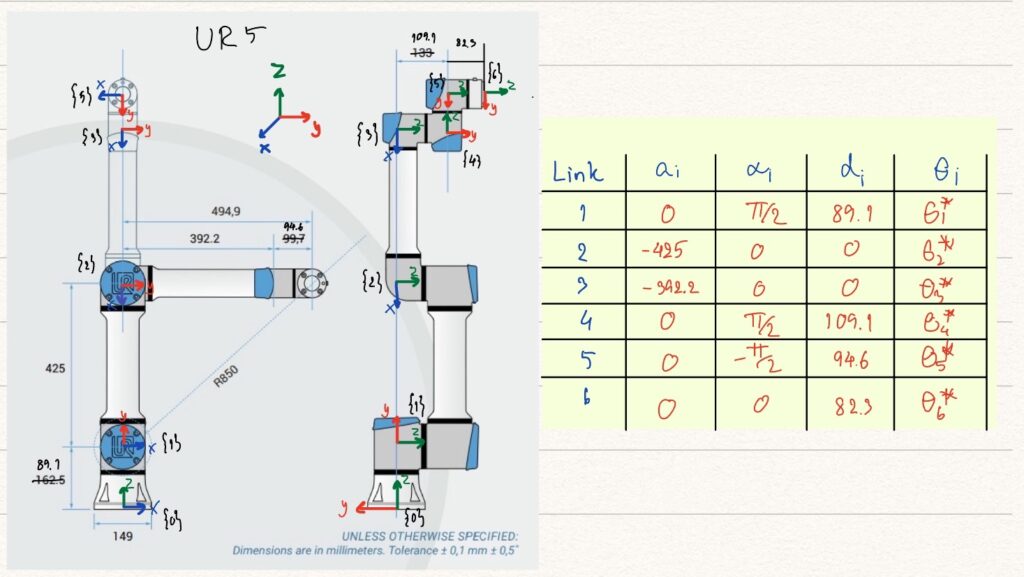
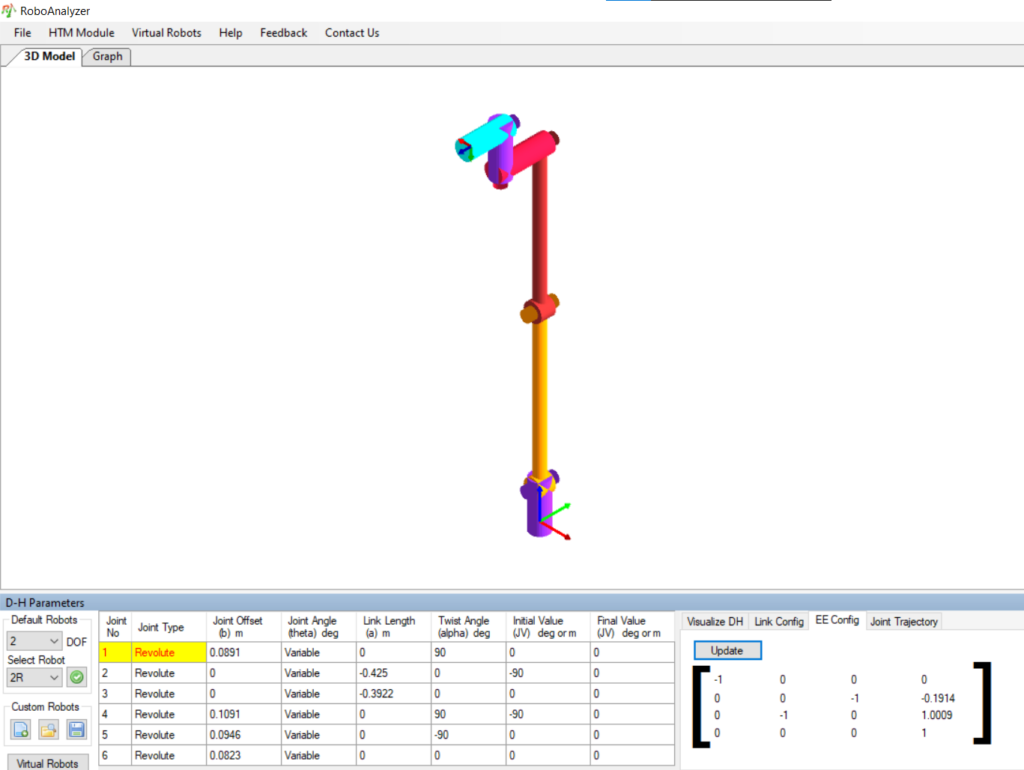
เทียบกับ Program RoboAnalyzer แล้ว ท่าทางกับตำแหน่ง End Effector ตรงกับที่คำนวน
Inverse Kinematics
Reference จาก Paper “UR5 Inverse Kinematics” โดย Ryan Keating และ Noah J. Cowan จาก Johns Hopkins University
จะได้คำตอบทั้งหมด 8 Solution
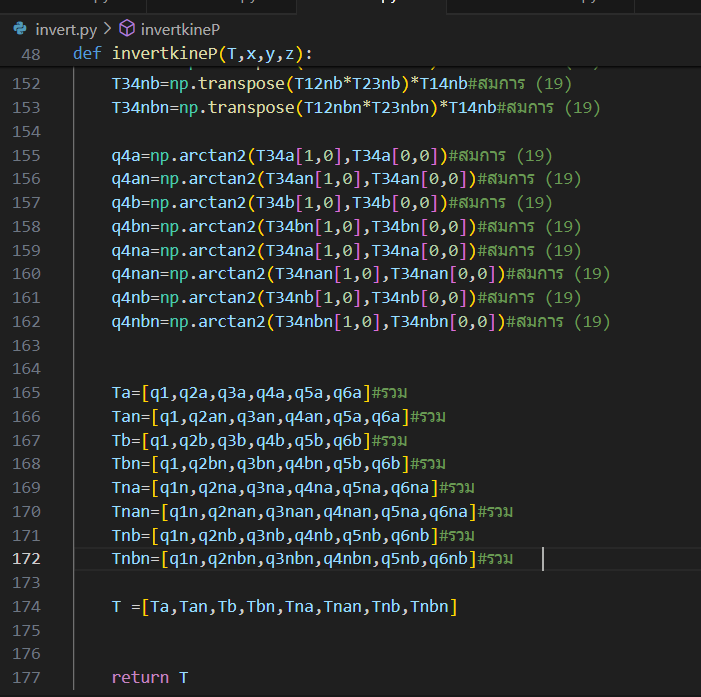

หลังจากเช็คความถูกต้อง ด้วยการนำค่าของ Joint ในบรรทัดที่ 1 ไปทำการ Forward Kinematics แล้ว Inverse Kinematics พบว่ามีค่าใกล้เคียงกันยกเว้นแกน 4 ที่ค่าผิดไปจากเดิม 1 องศา
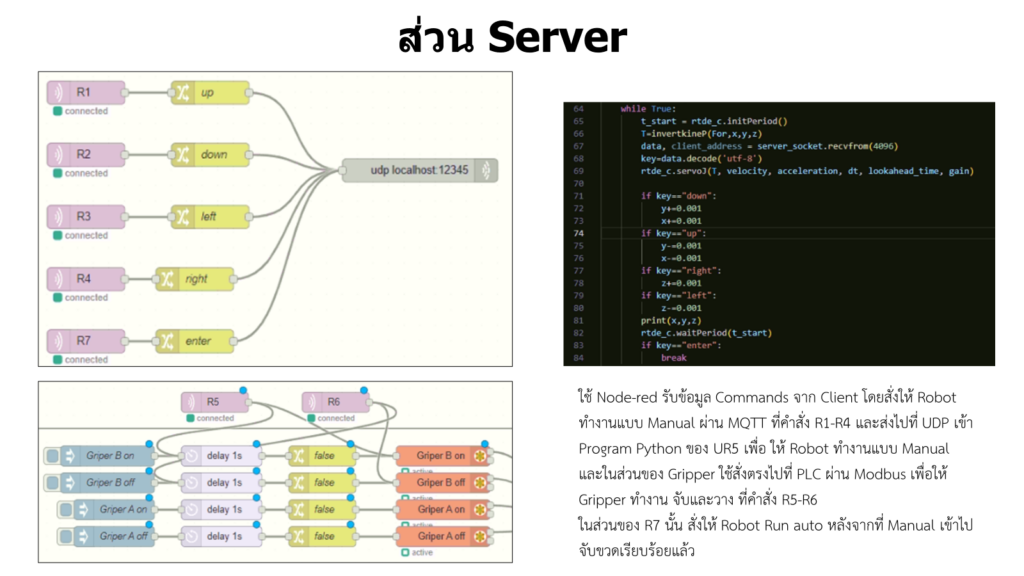
Flow Chart การทำงานของ Manual Control
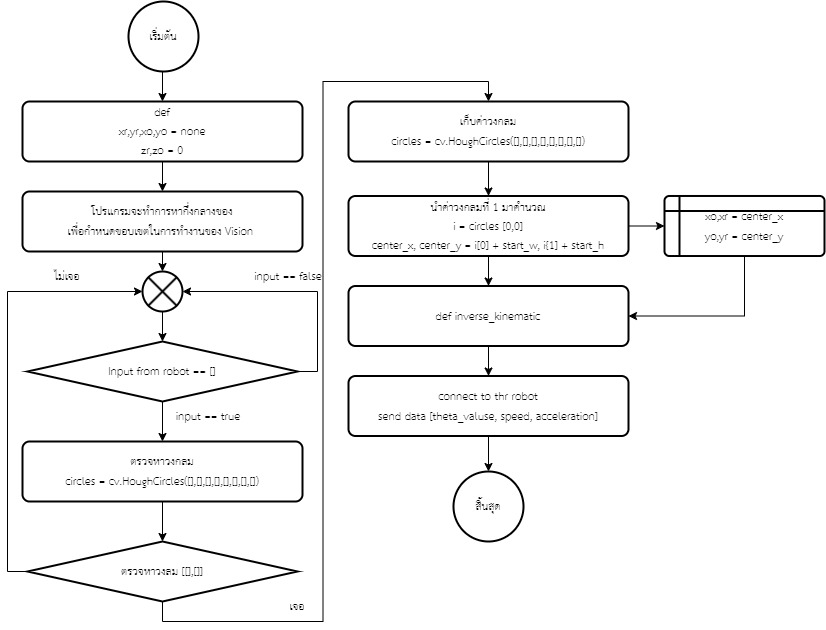
Inspecting Objects with Vision Camera
Detail Page : https://hcilab.net/uncategorized/inspecting-objects-with-vision-camera-2-hand-avatar-robot/ – 64340600420 นายพิชามญชุ์ ทาดี

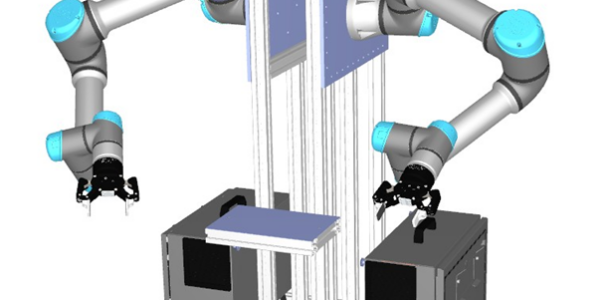
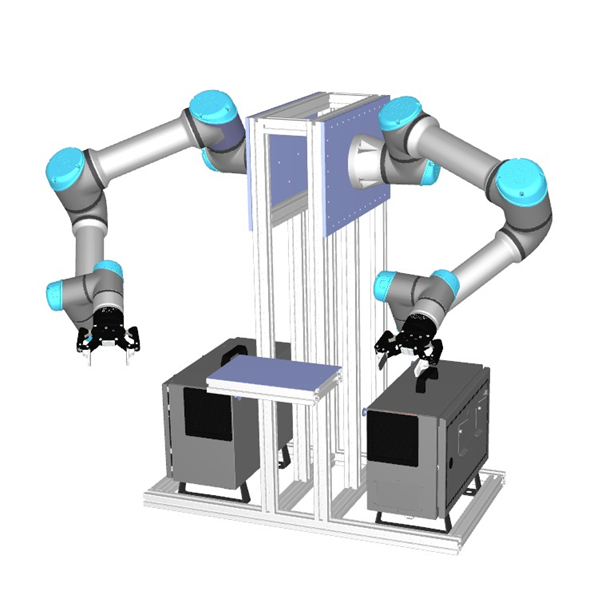
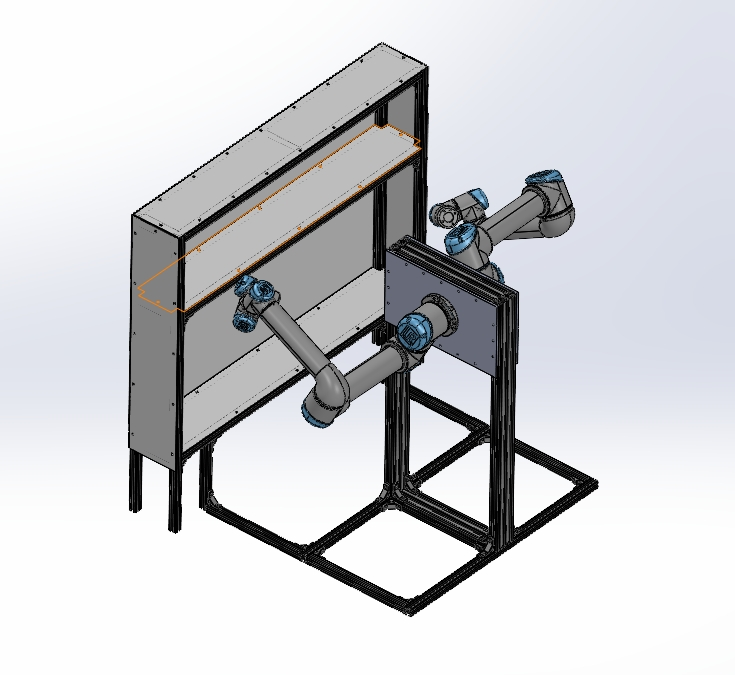
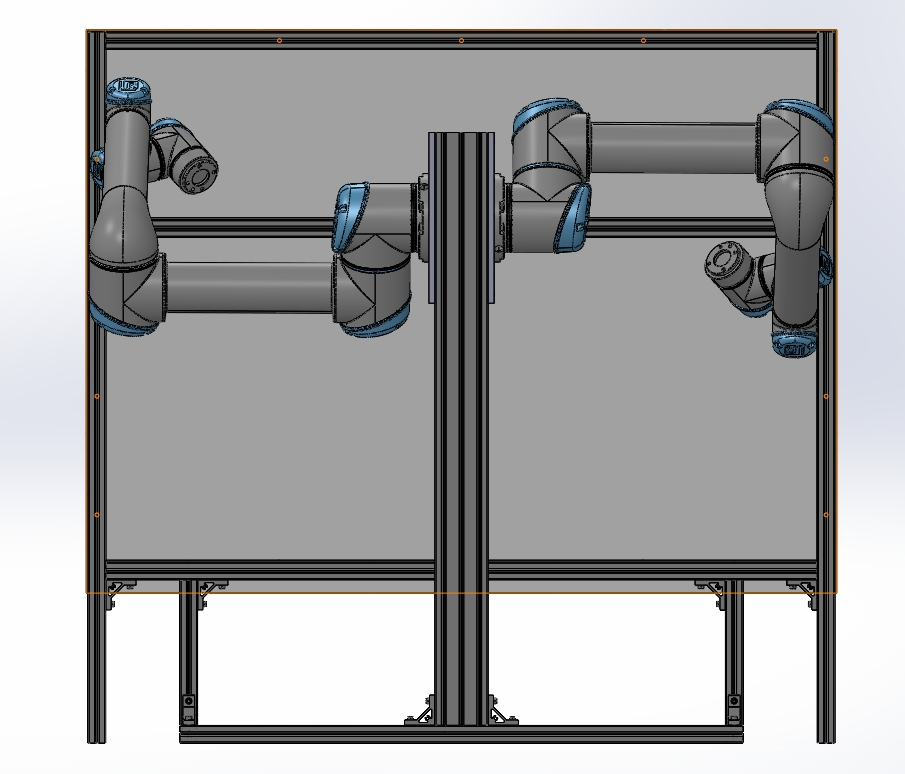
Robot Structure and Program
Detail Page : https://hcilab.net/uncategorized/structure-and-programming-design-for-dual-arm-robot/ – 64340600417 นายณัฐวุฒิ หารสุโพธิ์

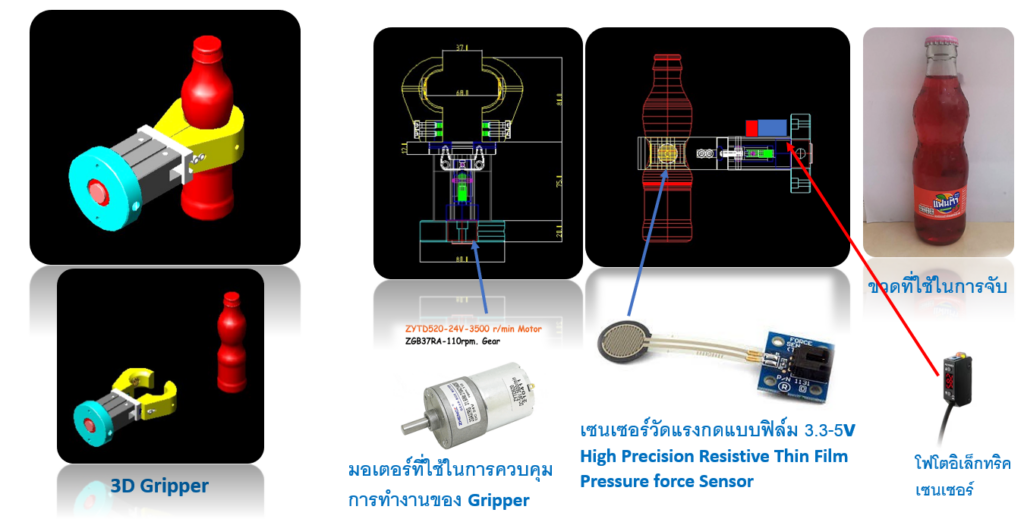
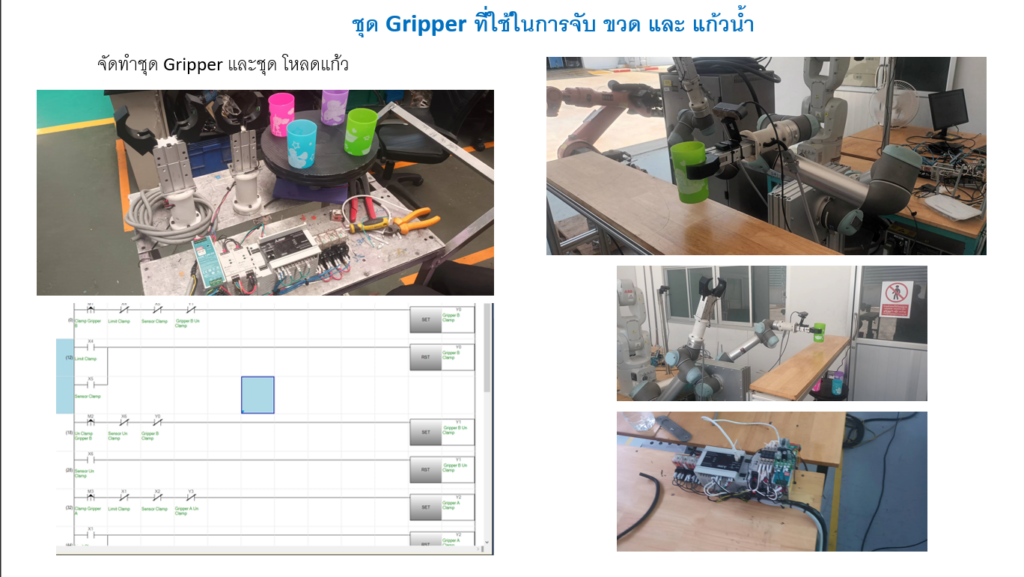
Robot Gripper
Detail Page : https://hcilab.net/uncategorized/gripper-robot – 64340700425 นายอุทัย ผลบุญ



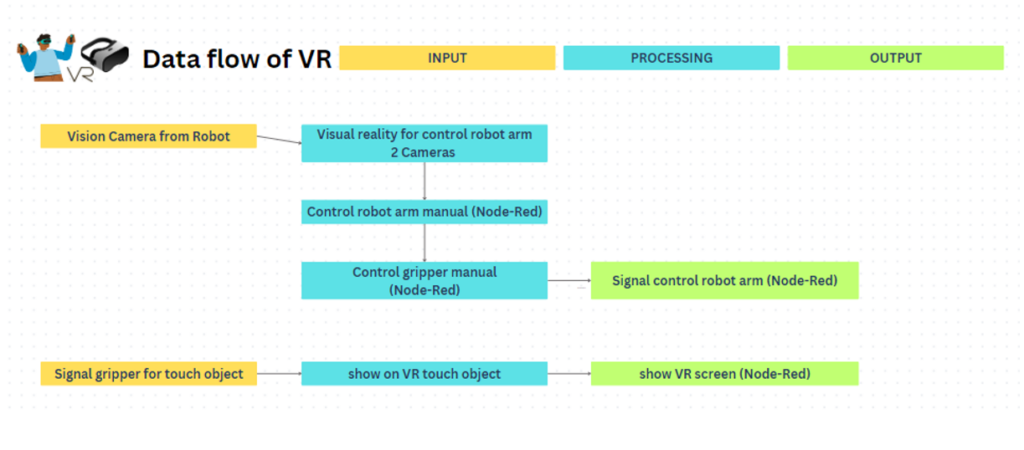
User Interactive (VR + Glove)
Interactive Glove
Detail Page : https://hcilab.net/uncategorized/interactive-glove/ – 64340700423 นายอัจชาณุวัฒน์ ลามา
งบประมาณโครงการทั้งหมด = 21,667.92 THB
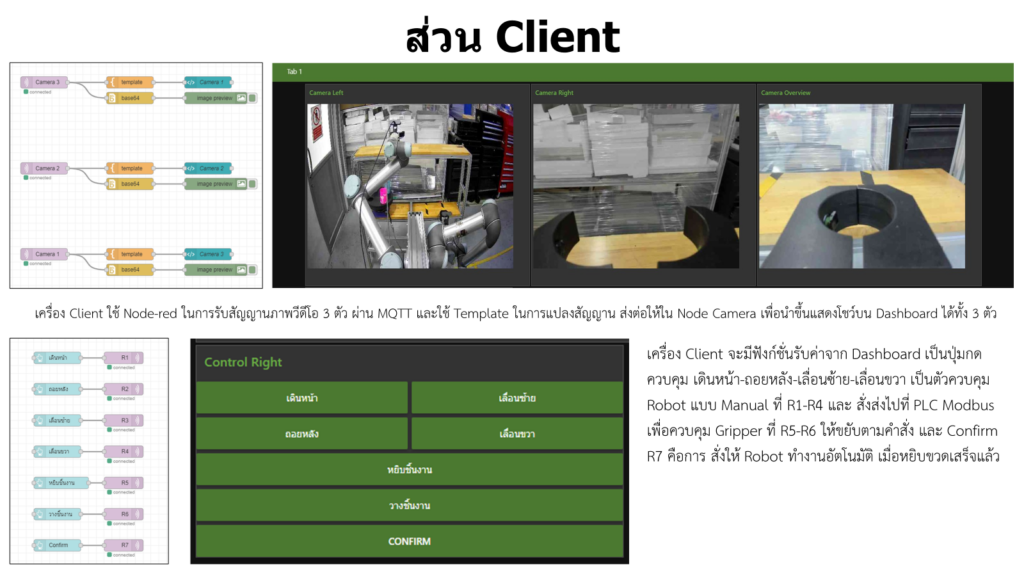
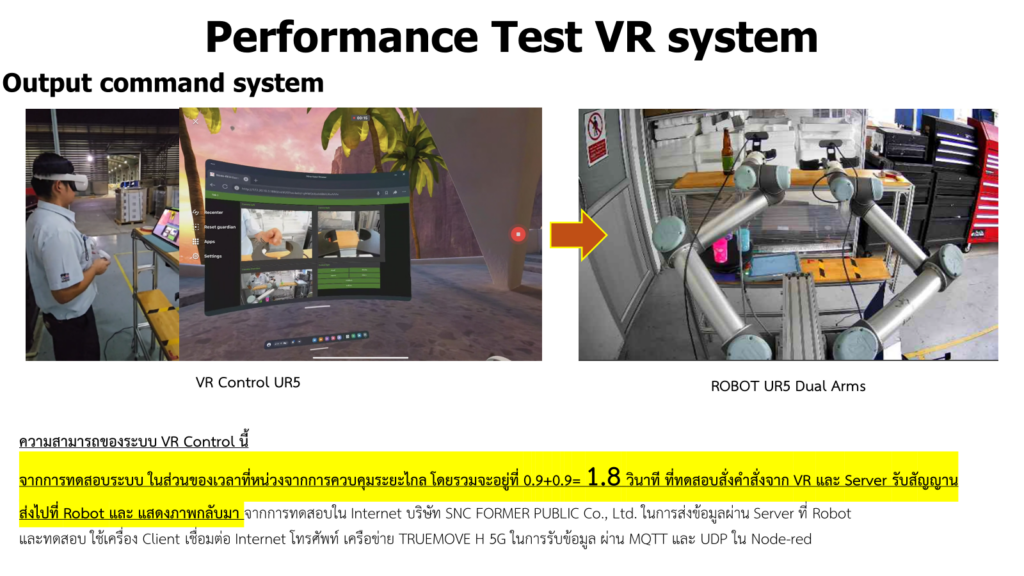
ตัวอย่างการทำงานของระบบ