ArUco Marker Tracking (Part 1)
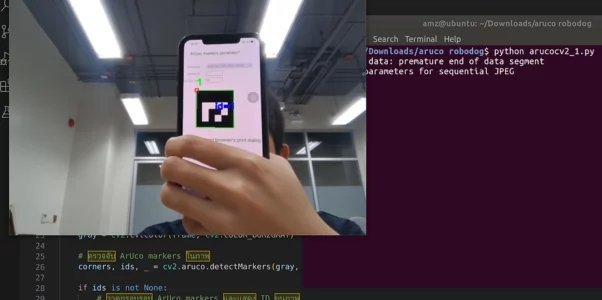
การตรวจจับและระบุตำแหน่งของ ArUco Marker ในภาพหรือวิดีโอจากกล้องหรือแหล่งข้อมูลภาพอื่น ๆ โดยใช้เทคนิคการประมวลผลภาพและความรู้ของกล้องในการหาตำแหน่งและการหมุนของ ArUco Marker ในขอบเขตของภาพหรือวิดีโอ ArUco Marker เป็นรหัสบาร์โค้ดที่สามารถระบุตำแหน่งและการหมุนของวัตถุในภาพได้ โดยการติดตาม ArUco Marker สามารถทราบได้ว่าวัตถุหรืออุปกรณ์ที่มี ArUco Marker ปรากฏในภาพอยู่ที่ไหน และมีการหมุนเท่าใด ซึ่งนี้เป็นกระบวนการที่มีประโยชน์ในการติดตามตำแหน่งของวัตถุหรือยานพาหนะในการพัฒนาและควบคุมหุ่นยนต์หรือระบบอัตโนมัติอื่น ๆ ประเภทของ ArUco Dictionary (คลังคำศัพท์ของ ArUco Markers) กระบวนการติดตาม ArUco Marker รวมถึงขั้นตอนการค้นหา (detection), การประมวลผล (processing), …