25/3/2024
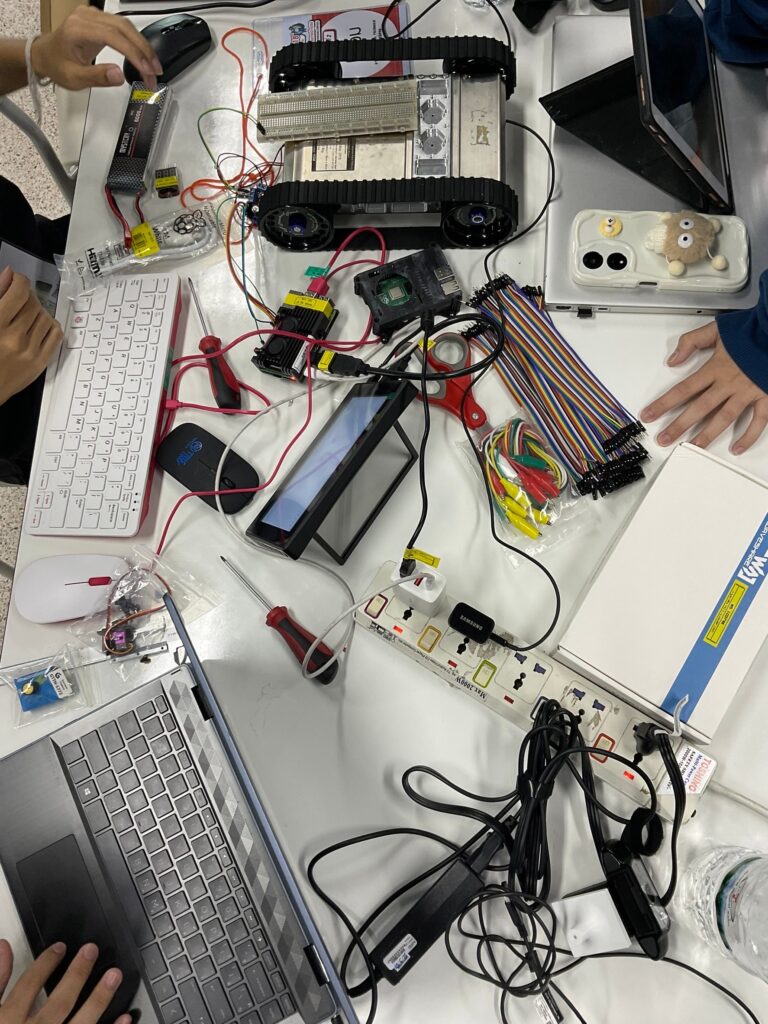
เป็นวันแรกที่ได้เข้าแลปกลุ่มวิจัยหุ่นยนต์และระบบอัตโนมัติ
ทำการหาข้อมูลเพื่อมาเสนอแนวคิดในการสร้างproject ซึ่งตัวprojectนั้นควรมีความสร้างสรรค์และเป็นประโยชน์แก่สังคม

26/3/2024
เมื่อได้ไอเดียถึงprojectที่จะทำเเล้วก็วางแผนออกแบบโครงสร้างของหุ่นยนต์ให้มีfunctionที่เหมาะสม เเละลิสต์อุปกรณ์ที่ต้องใช้ในการทำงานเพื่อวางแผนการซื้ออุปกรณ์
โดยprojectของเราเป็นหุ่นยนต์ส่งยาในโรงพยาบาล มี2prototypes
prototype แรกจะเป็นกระบวนการของการเคลื่อนที่และส่งภาพของหุ่นยนต์โดยหุ่นยนต์จะเคลื่อนที่ตามคำสั่งของHTC Vive tracker ส่งภาพจากwebcamไปที่raspberry pi ให้ oculus quest และprototype ที่สองจะเป็นกระบวนการของการส่งยาจากเภสัชให้กับผู้ป่วยผ่านตัวหุ่นยนต์
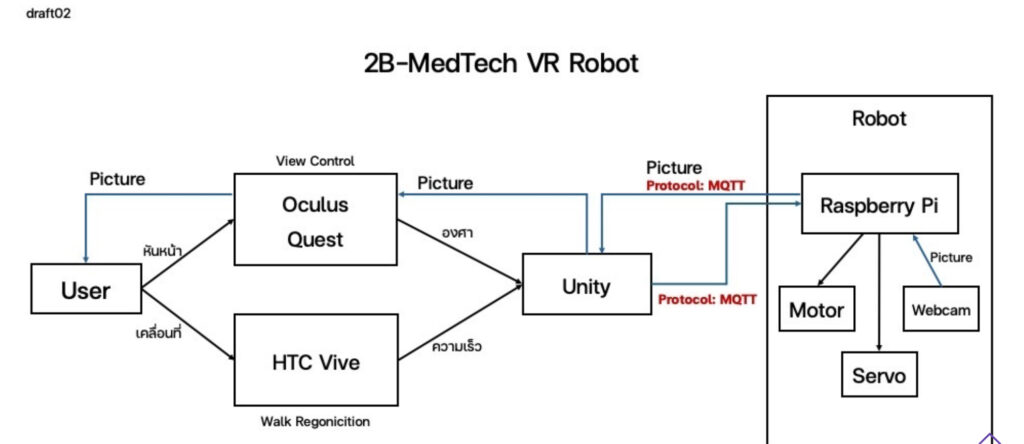
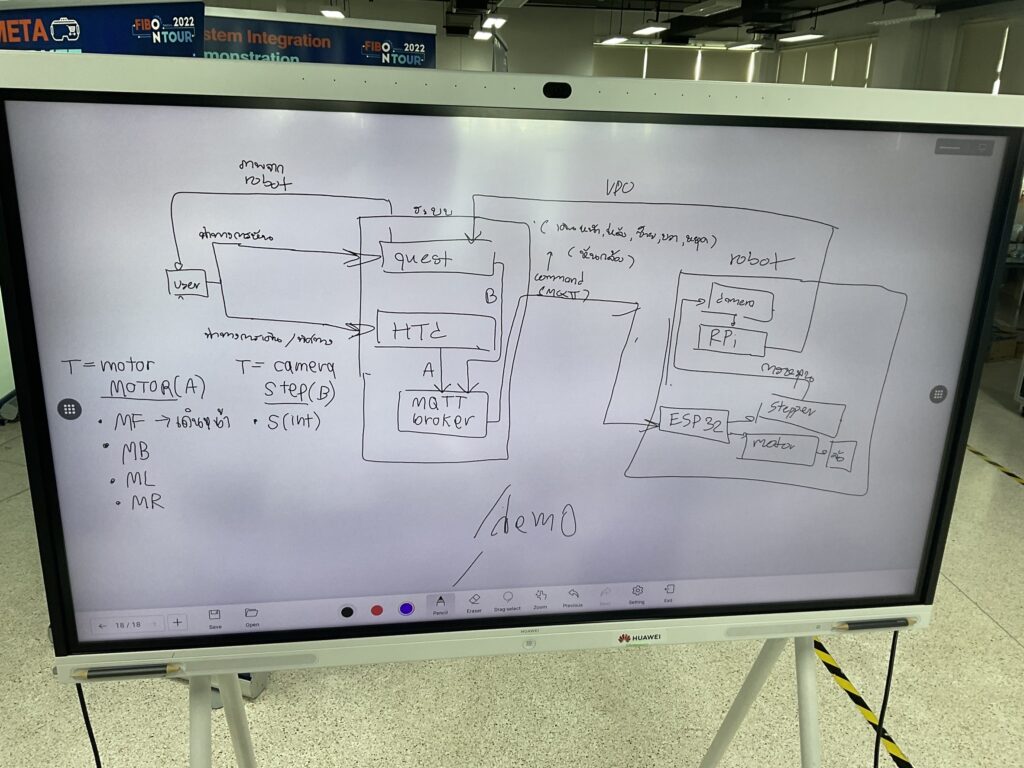
แผนผังกระบวนการทำงานของproject เราเป็นดังภาพนี้

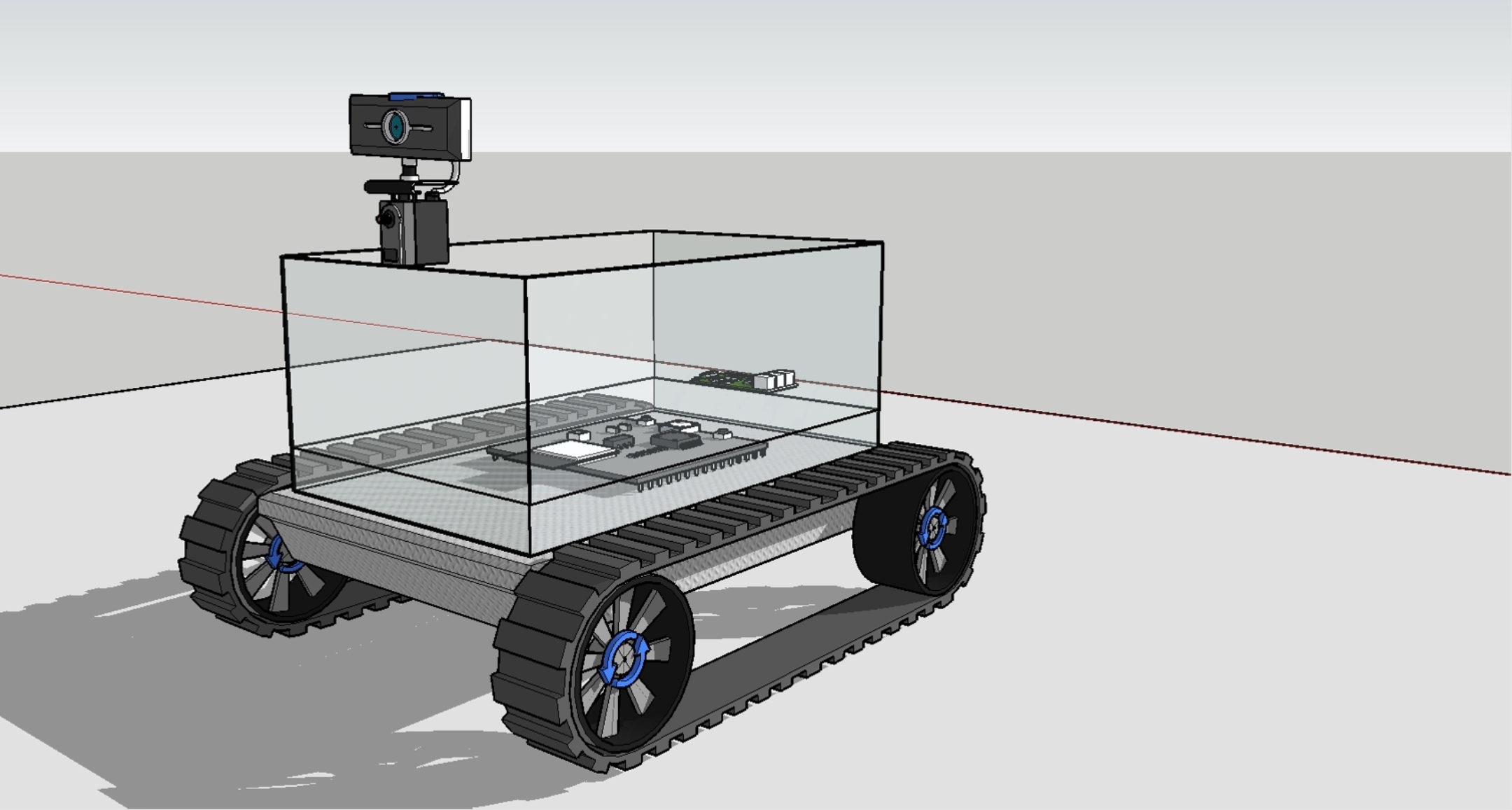
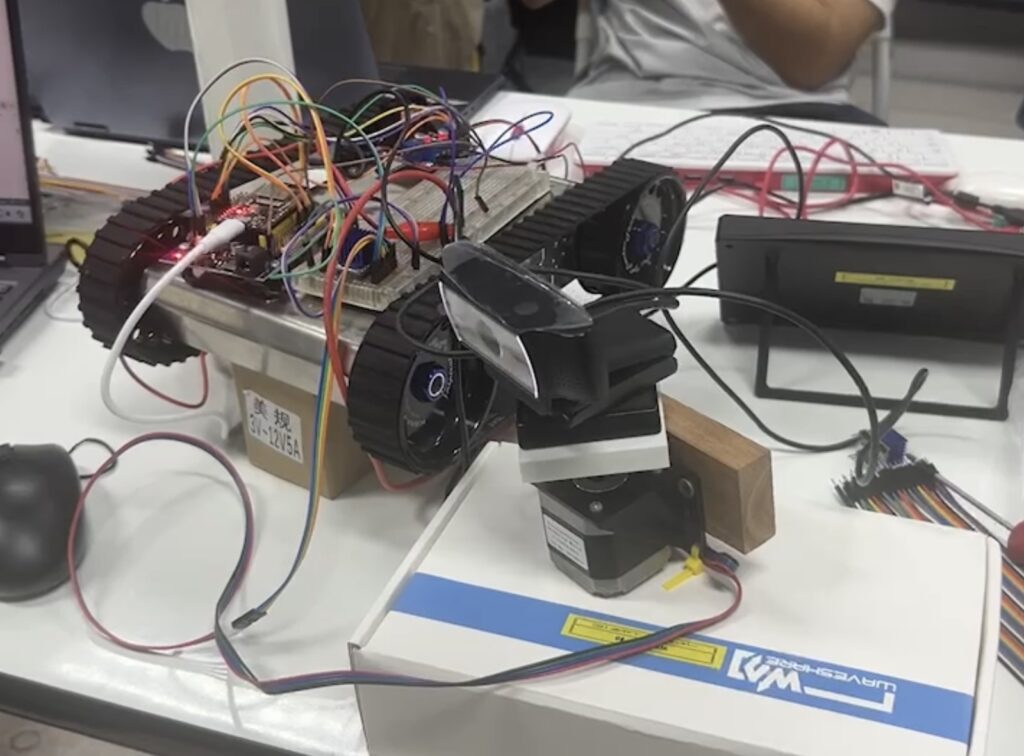
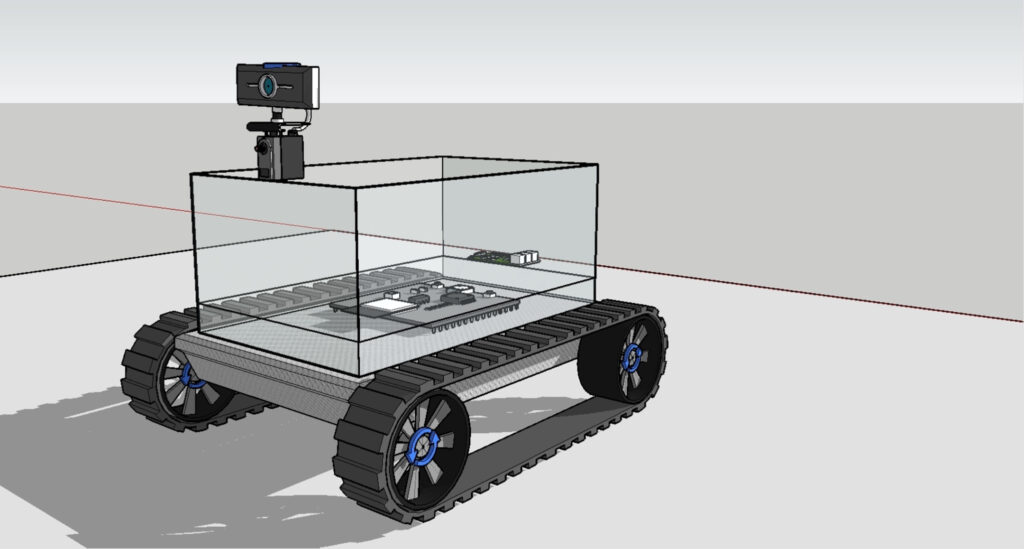
โครงสร้างของprojectเป็นดังภาพ
27/3/2024
ทำการออกแบบ 3D printในส่วนของชิ้นส่วนที่ใช้ในการบรรจุยา (prototype สอง) และช่วยในการต่อวงจร


28/3/2024
สั่งซื้ออุปกรณ์ที่ใช้ในการทำงาน ช่วยในกระบวนการต่อวงจร ทำการศึกษาเรื่อง web RTC และค้นหาวิธีเชื่อม web cam กับ raspberry pi



29/3/2024
จากการทำงานที่ผ่านมาทางทีมยังพบกับปัญหาในการทำงานอยู่ เลยทำการหาข้อมูลเพิ่มเติมเพื่อทำการแก้ไขปัญหา โดยปัญหาที่เกิดขึ้น ณ ตอนนี้มีดังนี้
1.UV4l ลงไม่ได้ทำให้ไม่สามารถเปิดserverแชร์ภาพได้ เลยทำการเเก้ไขโดยเปลี่ยนมาใช้วิธีเปิดserver ผ่าน raspberry pi และ 2.เป็นปัญหาในเรื่องของระยะเวลาเนื่องจากเรามีเวลาในการทำproject ที่จำกัดจึงต้องทำงานในส่วนของprototypeหนึ่งให้เสร็จสิ้นก่อนและค่อยมาต่อยอดงานด้วยprototypeสอง
1/4/2024
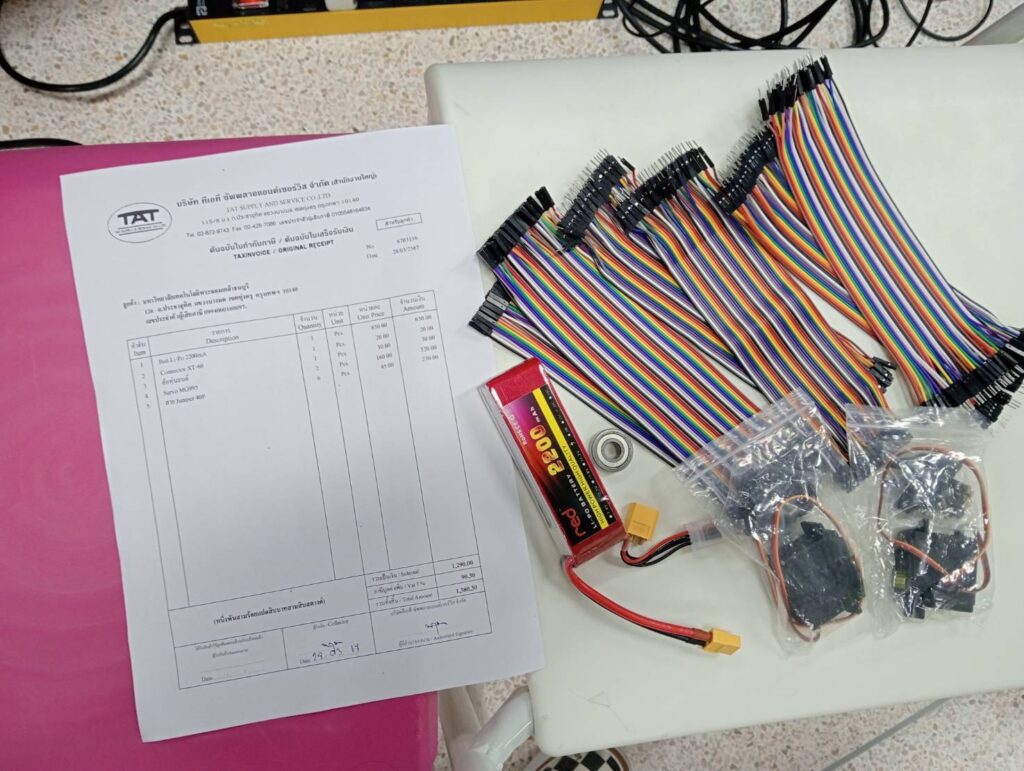
วันนี้อุปกรณ์ที่ใช้ในการทำงานที่สั่งไป มาส่งครบเรียบร้อยหมดแล้ว เลยสามารถทำเรื่องส่งเอกสารการขอเบิกค่าอุปกรณ์การทำโครงงานได้
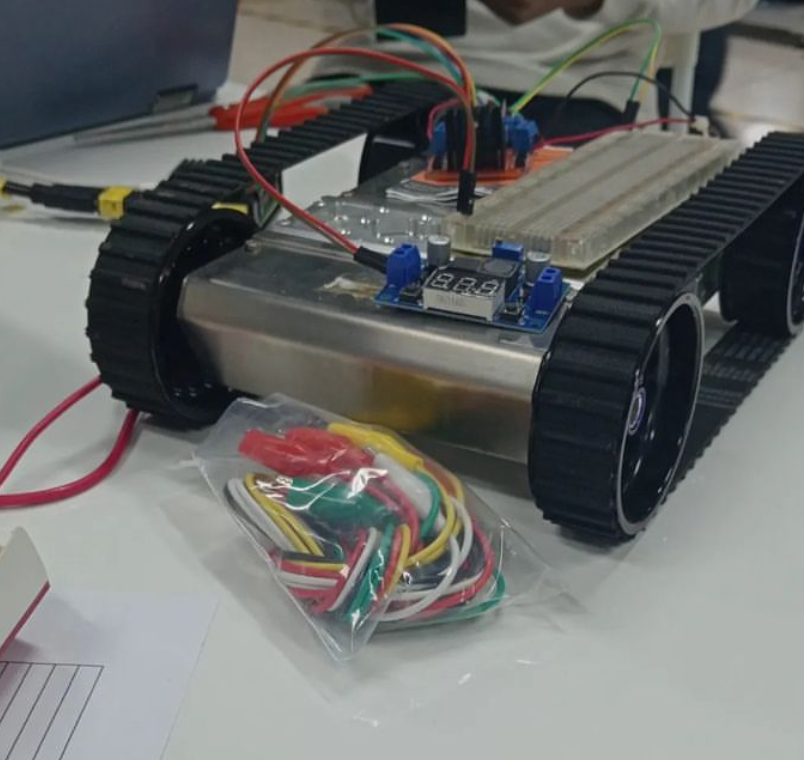
วันนี้ทางงานของHardwareหลักๆส่วนมากจึงเหลือแต่การประกอบชิ้นส่วนต่างๆให้ครบถ้วน
เริ่มเขียนabstract(บทคัดย่อ)

2/4/2024
วันนี้เราสามารถประกอบโครงสร้างต่างๆของหุ่นยนต์ เตรียมการทำpresentation เเละ videoที่ใช้ประกอบการpresent ในวันนี้เราสามารถทำให้stepperที่ควบคุมการหมุนของกล้องหมุนได้



3/4/2024
ตอนนี้งานของเรามีความคืบหน้าขึ้นเป็นอย่างมากเมื่อเทียบกับวันแรกๆ สิ่งที่เราสามารถทำได้แล้วในตอนนี้ มีดังนี้
สามารถเชื่อม raspberry piกับweb camได้แล้ว ทำให้สามารถส่งข้อมูลรูปภาพขึ้นserverไปstreamที่obsและให้unityส่งไปใน oculus quest
HTC VIVEสามารถส่ง commandผ่าน mqtt ไปยังตัวล้อของrobotทำให้ตอนนี้ตัวrobotสามารถขยับได้แล้ว
Stepperที่ควบคุมการหมุนของกล้องสามารถหมุนได้แล้ว

4/4/2024
วันนี้เป็นวันในการสรุปผลและเตรียมตัวสำหรับการนำเสนอ สิ่งที่ทำก็คือแก้ไขข้อบกพร่องของงาน ทำสไลด์เเละvideoประกอบการนำเสนอ
5/5/2024
วันนี้เป็นวันสุดท้ายของการเข้าค่าย 2B-KMUTT รุ่นที่18 ทุกคนในทีมได้ช่วยกันนำเสนอผลงานในวันนี้จากการทำงานในครั้งนี้ทำให้เนยได้อะไรกับไปหลายๆอย่างเลยไม่ว่าจะเป็นได้ ความรู้ใหม่ๆ ก่อนหน้านี้เนยไม่เคยมีประสบการณ์ในการทำหุ่นยนต์มาก่อน ทำให้เราได้รู้จักอะไรใหม่ๆ ไม่ว่าจะเป็นboard raspberry piก็ไม่เคยใช้ MQTT ก็ไม่รู้จัก ไม่เคยใช้ Oculus quest ไม่เคยใช้ HTC VIVE ทุกอย่างคือเรื่องใหม่สำหรับเนยค่ะ เเต่พอเราได้ทำงานนี้เเล้วก็ทำให้เรารู้จักกับสิ่งที่พูดไปดังกล่าวมากยิ่งขึ้นไม่มากก็น้อย นอกจากนี้สิ่งที่สำคัญพอๆกับความรู้ที่ได้กลับมาก็คือ connection การที่เราเป็นมนุษย์เราก็ต้องมีปฏิสัมพันธ์กับคนอื่น การรู้จักเพื่อนใหม่ๆ ทำให้เราได้อะไรกับไปเยอะ เพราะเเต่ละคนก็มาจากต่างที่ มีต่างความคิดกัน ทำให้เราได้ไอเดียใหม่ๆไปพัฒนาตัวเอง การมาค่ายครั้งนี้ถือว่าเป็นประสบการณ์ที่ดีค่ะ