Project : A study and development project for legged robots with hand gesture recognition for wheelchair assistance

Objective
- 1.เพื่อศึกษาและพัฒนาโปรแกรมสำหรับการควบคุมหุ่นยนต์เคลื่อนที่ได้แบบใช้ขาให้สามารถเคลื่อนที่ไปยังตำแหน่งที่ต้องการได้
- 2.เพื่อศึกษาและพัฒนาโปรแกรมสำหรับการควบคุมหุ่นยนต์เคลื่อนที่ได้แบบใช้ขาให้สามารถเคลื่อนที่ไปยังตำแหน่งที่ต้องการได้
- 3.เพื่อศึกษาและพัฒนาโปรแกรมสำหรับติดตามรถเข็นของผู้พิการ
- 4.เพื่อศึกษาและพัฒนาโปรแกรมตรวจจับสัญลักษณ์มือในการสั่งงานหุ่นยนตเ์คลื่อนที่ได้แบบใช้ขา
- 5.เพื่อประเมินประสิทธิภาพของโปรแกรมที่พัฒนาขึ้น
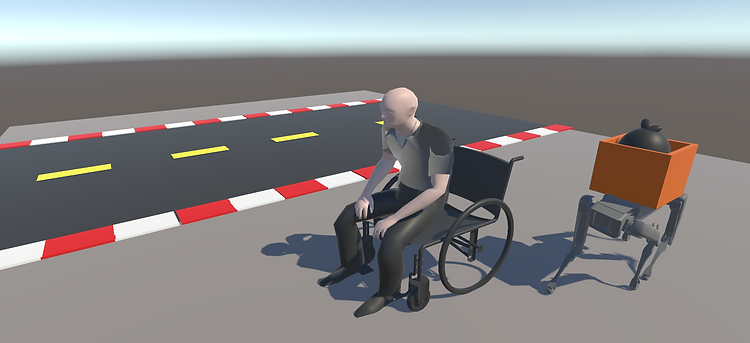
System Scenario
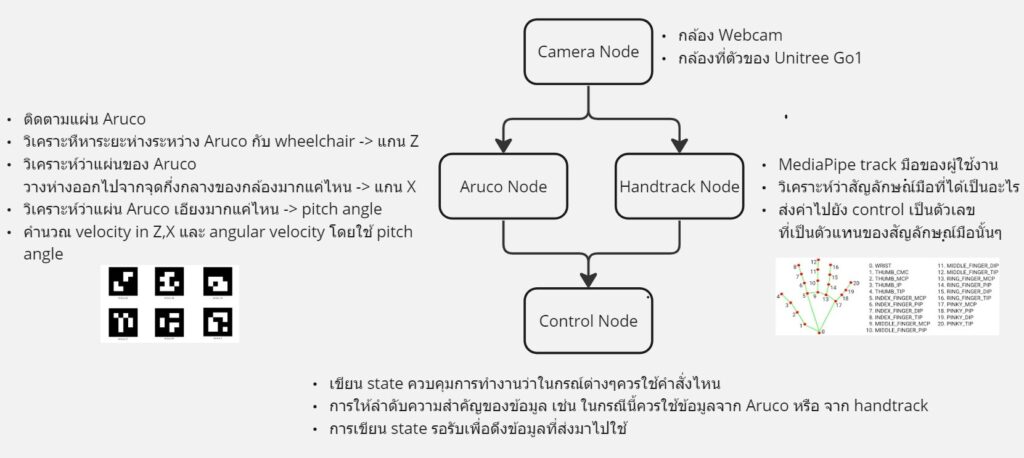
System Data Flow
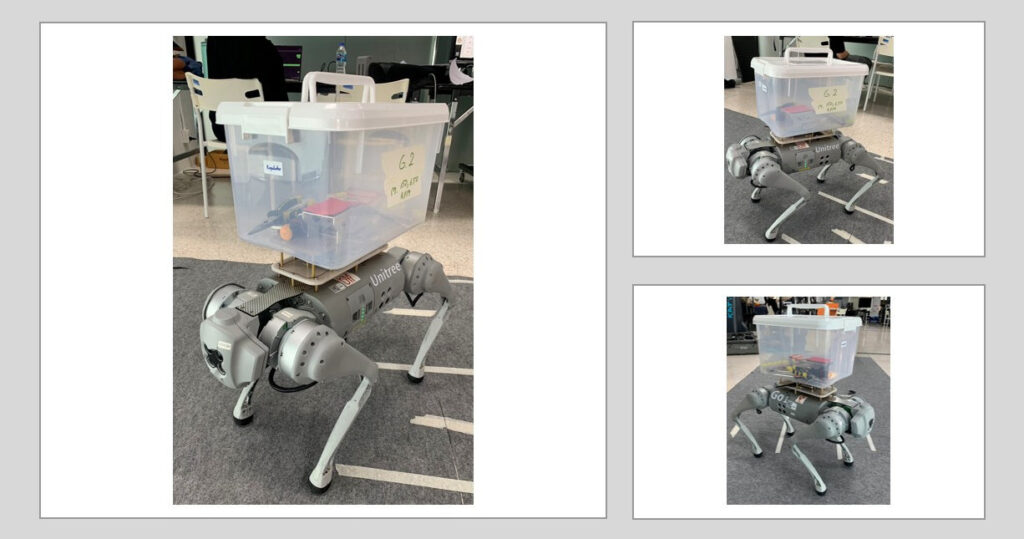
หลักการทำงานของ ROBODOG
ในการเขียนระบบควบคุมหุ่นยนต์ตัวนี้ จะเป็นการนำเอาระบบที่ทางบริษัทออกแบบการทำงานมาแล้ว ซึ่งเขาได้อำนวยความสะดวกให้ผู้พัฒนามือใหม่สามารถเข้าไปลองพัฒนาได้อย่างง่าย โดยจะแบ่งการควบคุมหุ่นตัวนี้ออกเป็น 2 ระดับ 1.LOWLEVEL 2.HIGHLEVEL
- Low level คือ การที่เราจะเข้าไปควบคุมการเคลื่อนที่ของ motor ในตำแหน่งต่างๆของตัวหุ่นโดยตรง เช่น จะให้ motor แต่ละตัวเคลื่อนที่ไปที่ตำแหน่งไหน เราสามารถแก้ไขได้ในระดับนั้น ซึ่งถ้าหากจะให้มันใช้ได้ มีความจำเป็นที่ต้องเข้าใจการทำงานของหุ่นและสามารถสร้าง model ทางคณิตศาสตร์ขึ้นมาได้เพื่อให้การควบคุมหรือการทำงานสามารถทำงานได้สอดคล้องกับลักษณะการเคลื่อนที่ของหุ่น ไม่อย่างนั้น motor บางตัวอาจจะเกิดความเสียหายได้
- High level คือ การที่เราสามารถเข้าไปใช้งานชุดคำสั่งที่ทางบริษัทได้มีการพัฒนาขึ้นมาแล้วได้ เช่น ถ้าหากเราต้องการให้หุ่นเคลื่อนที่ไปด้านหน้ามันก็จะสามารถเคลื่อนที่ไปยังด้านหน้าได้โดยมันจะคำนวณตำแหน่งการเคลื่อนที่ของแต่ละ motor ขึ้นมาให้เองในเบื้องหลัง ในระดับ low level
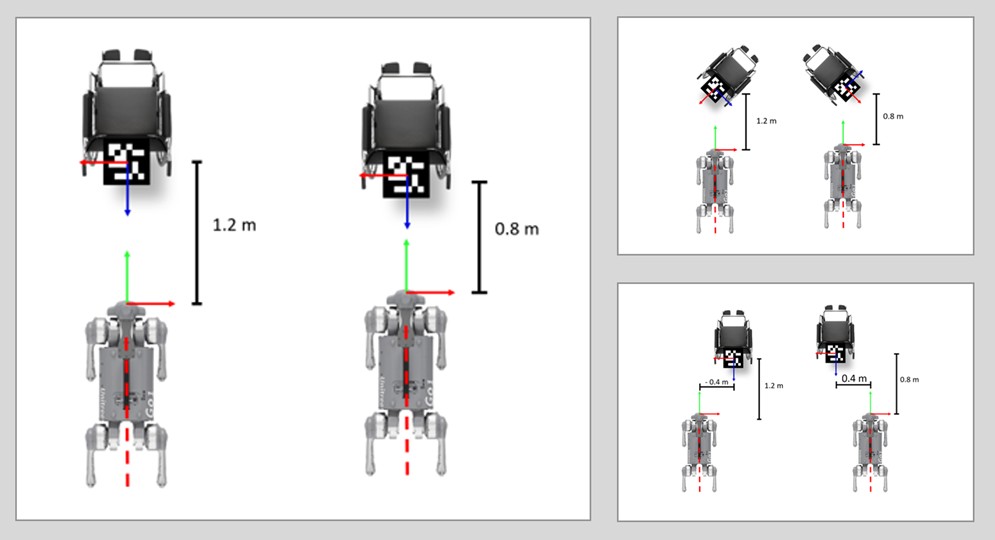
Aruco Tracking
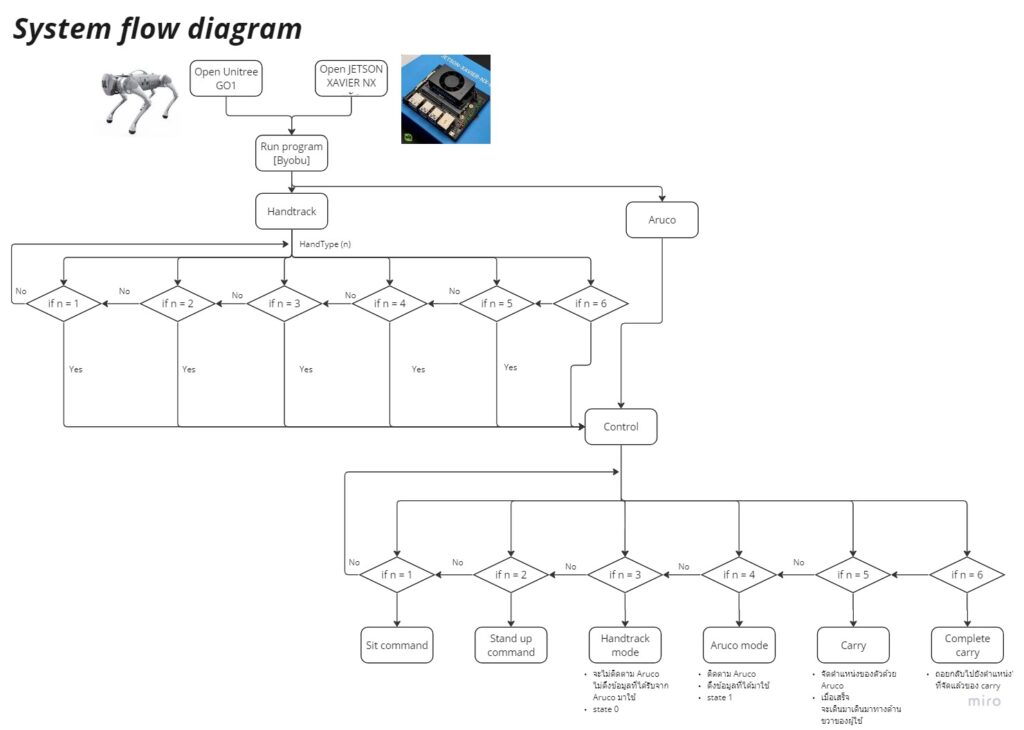
Three States of the robot
- 0 Default state (Hand Tracking)
- 1 Aruco state (Use for follow wheelchair)
- 2 Carry state (Robot move to carried position)


Guide Robodog
Team Members
- 66340700401 นายกวิน แย้มด่วน Workload => Control Robodog
- 66340700402 นายกอบโชค ปภานิธิสกุล Workload => Integrate system
- 66340700404 นายเมธีรัฐ เสนคำสอน Workload => ArUco Marker
- 66340700405 นายวชิรเมษฐ์ กุลธนาเรืองนนท์ Workload => Hand Tracking
- 66340700406 นายวิธวินท์ ปิ่นประเสริฐ Workload => logic for tracking ArUco Marker

Contents
Control
Vision
Content of Metheerat
Content of Wachiramate
Part : Hand Tracking
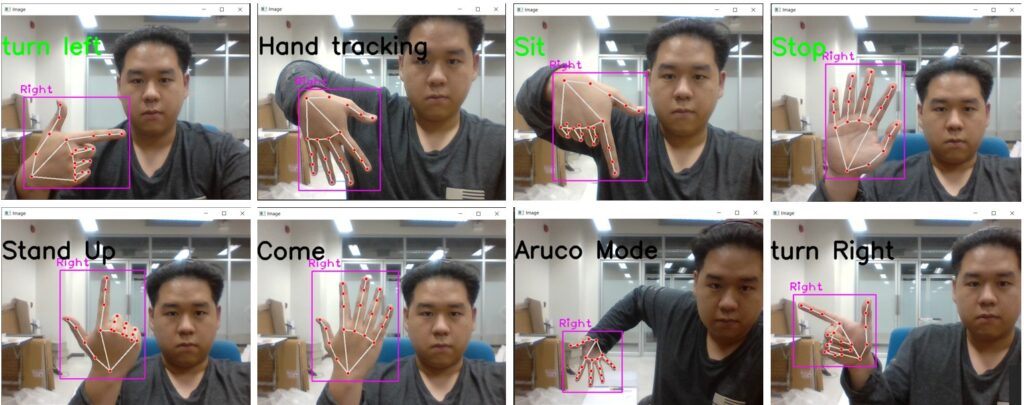
- The first step in learning about Hand tracking
- Test Hand Tracking ครั้งที่1และ2
- Test Hand Tracking ครั้งที่ 3
- Final Test Hand Tracking ครั้งที่ 4
Part : Design Box and Screen Protector