
1. ที่มาและความสำคัญ
แนวคิดของหุ่นยนต์บริการภายในโครงการนี้ได้รับการต่อยอดจากงานวิจัยและระบบร้านกาแฟอัจฉริยะที่มีการประยุกต์ใช้เทคโนโลยีหุ่นยนต์ในงานบริการ รวมถึงแนวคิดด้าน Human-Robot Collaboration และ Smart Service System ร่วมกับแพลตฟอร์มบริการร้านกาแฟอัตโนมัติ เช่น CafeX อีกทั้งยังได้รับแรงบันดาลใจจากแนวคิด Avatar Robot สำหรับผู้พิการ ซึ่งมุ่งเน้นการใช้เทคโนโลยีหุ่นยนต์เพื่อช่วยลดข้อจำกัดทางด้านร่างกายและเพิ่มโอกาสในการมีส่วนร่วมทางสังคม จึงนำมาสู่การพัฒนาโครงการนี้ในรูปแบบของ “หุ่นยนต์ผู้ช่วย” ที่สามารถทำงานร่วมกับมนุษย์ได้ในสภาพแวดล้อมจริง ภายใต้แนวคิดการเข้าถึงได้ ความปลอดภัย และความเท่าเทียมในการทำงาน

1. วัตถุประสงค์ของโครงการ (Objectives)
วัตถุประสงค์หลักแบ่งออกเป็น 3 ด้านสำคัญ ดังนี้
- ด้านการเสริมศักยภาพมนุษย์และสร้างโอกาส (Empowerment & Opportunity)
- เพื่อสร้างโอกาสในการทำงานให้กับผู้พิการ หรือกลุ่มผู้ที่มีความต้องการพิเศษ เช่น ผู้ที่มีอาการกล้ามเนื้ออ่อนแรงหรือมือสั่น ให้สามารถปฏิบัติหน้าที่บาริสต้าได้อย่างมีประสิทธิภาพและเท่าเทียม
- มุ่งเน้นการใช้หุ่นยนต์เพื่อเป็น “ผู้ช่วย” เสริมศักยภาพมนุษย์ (Empowerment) มากกว่าการนำมาทำงานแทนที่มนุษย์ (Replacement)
- ด้านการพัฒนาระบบการควบคุมที่ง่ายต่อการใช้งาน (Simplification)
- เพื่อพัฒนาการสอนงานหุ่นยนต์แบบ “จับประคอง” (Hand-Guided Programming) ซึ่งช่วยลดความซับซ้อน ไม่ต้องพึ่งพาการเขียนโค้ดหรือใช้อุปกรณ์ควบคุมที่ใช้งานยาก
- ออกแบบหน้าจอสัมผัส (UI) ที่ใช้งานสะดวก และพัฒนาระบบให้หุ่นยนต์สามารถจดจำพฤติกรรมหรือท่าทางจากมนุษย์ได้โดยตรง
- ด้านความปลอดภัยและการใช้เทคโนโลยีขั้นสูง (Safety & Intelligence)
- เพื่อบูรณาการเทคโนโลยี Machine Vision และ Force Sensor เข้าด้วยกันเพื่อให้หุ่นยนต์ทำงานในงานบริการได้อย่างปลอดภัย
- สร้างระบบจำลอง Digital Twin เพื่อตรวจสอบท่าทางการเคลื่อนไหวเสมือนจริง และใช้กล้อง Stereo Camera สร้าง 3D Skeleton เพื่อป้องกันการชนและเพิ่มความปลอดภัยสูงสุดขณะคนทำงานร่วมกับหุ่นยนต์
2. ขอบเขตของโครงการ (Scope)
ขอบเขตการพัฒนาครอบคลุม 3 ส่วนหลัก ได้แก่
- ขอบเขตด้านโครงสร้างและสมรรถนะ (Hardware Specifications)
- ใช้แขนกล 6 แกน และตัวจับ (Gripper) 1 แกน ที่ออกแบบมาเพื่อหยิบจับแก้วและอุปกรณ์ทรงกระบอกโดยเฉพาะ
- ตัวหุ่นน้ำหนักรวมไม่เกิน 15 กิโลกรัม ระยะเอื้อมจากฐานถึงปลายมือไม่เกิน 60 เซนติเมตร และสามารถรองรับน้ำหนักยก (Payload) ได้สูงสุด 2 กิโลกรัม
- ขอบเขตด้านระบบควบคุมและซอฟต์แวร์ (Control & Software)
- ระบบต้องรองรับการสอนงานแบบจับประคอง และควบคุมผ่านหน้าจอ Touch Screen ที่แสดงผล Digital Twin ได้
- สามารถบันทึกโปรแกรมการทำงานหรือเมนูต่างๆ ได้สูงสุด 10 โปรแกรม และมีระบบ Task Planning สำหรับจัดลำดับการชงกาแฟอัตโนมัติ
- ขอบเขตด้านระบบการมองเห็นและความปลอดภัย (Vision & Safety)
- ใช้เทคโนโลยี AI (YOLO) และกล้องตรวจจับระยะลึกเพื่อระบุตำแหน่งแก้วกาแฟและอุปกรณ์
- มีระบบความปลอดภัยที่ตรวจจับมนุษย์ผ่าน 3D Skeleton และติดตั้ง Force Sensor เพื่อให้หยุดทำงานทันทีเมื่อมีการสัมผัส (Collision Detection) โดยแบ่งระยะปลอดภัยเป็น 3 ระดับ (Safe/Warning/Danger)
ภาพจำลองประกอบชองหุ่นยนต์ผู้ช่วยในโครงการ
3. การออกแบบและพัฒนา
การออกแบบและพัฒนาโครงการ FIBO ROBOT CAFE เป็นการบูรณาการเทคโนโลยีหุ่นยนต์ ปัญญาประดิษฐ์ และระบบควบคุมเข้าด้วยกัน โดยมุ่งเน้นที่การสร้างหุ่นยนต์ผู้ช่วยอัจฉริยะที่ทำงานร่วมกับมนุษย์ได้อย่างปลอดภัย รายละเอียดในการออกแบบและพัฒนามีดังนี้
1 การออกแบบโครงสร้างทางกลและฮาร์ดแวร์ (Mechanical & Hardware Design)
- โครงสร้างแขนกล: พัฒนาจากโมเดลสำเร็จรูปของ Arctos Robotics ซึ่งเป็นแขนกล 6 แกน และตัวจับ (Gripper) 1 แกน โดยมีน้ำหนักรวมไม่เกิน 15 กิโลกรัม ระยะเอื้อมไม่เกิน 60 เซนติเมตร และสามารถยกน้ำหนักได้สูงสุด 2 กิโลกรัม
- การออกแบบ Gripper: ใช้ตัวจับแบบ Parallel Jaw ที่ได้รับแรงบันดาลใจจาก Model T42 เพื่อหยิบจับแก้วทรงกระบอกได้อย่างมั่นคง ชิ้นส่วนผลิตด้วยเครื่องพิมพ์ 3 มิติ โดยใช้ วัสดุ TPU ในส่วนที่สัมผัสแก้วเพื่อให้มีความยืดหยุ่น และ PETG-CF สำหรับโครงสร้าง
- ระบบประมวลผล: ใช้ระบบการทำงานแบบกระจายส่วน (Distributed System) ประกอบด้วย Jetson Nano สำหรับ Vision/AI, Raspberry Pi 5 เป็นหน่วยประมวลผลหลักของ ROS2 และ Web UI และใช้ ESP32/Arduino Mega ควบคุมมอเตอร์และเซนเซอร์
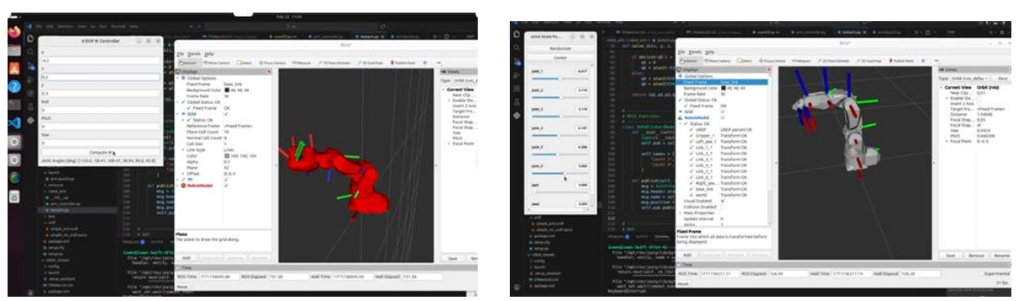
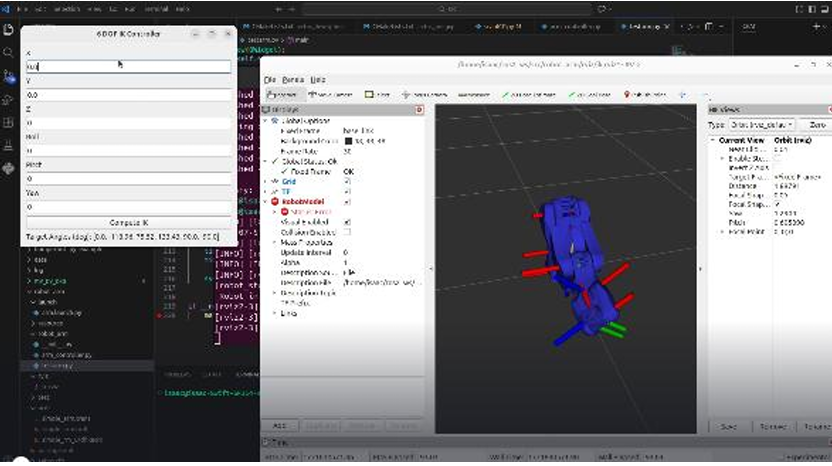
2 ระบบควบคุมและจลนศาสตรศาสตร์ (Control & Kinematics)
- รูปแบบการเคลื่อนที่: รองรับทั้งแบบ Joint Space (อิงมุมข้อต่อ) และ Task Space (อิงพิกัดตำแหน่ง) โดยมีระบบ Hand-Guided Programming ที่ช่วยให้ผู้ใช้สอนงานหุ่นยนต์ได้จากการจับแขนประคองไปยังตำแหน่งที่ต้องการโดยตรง
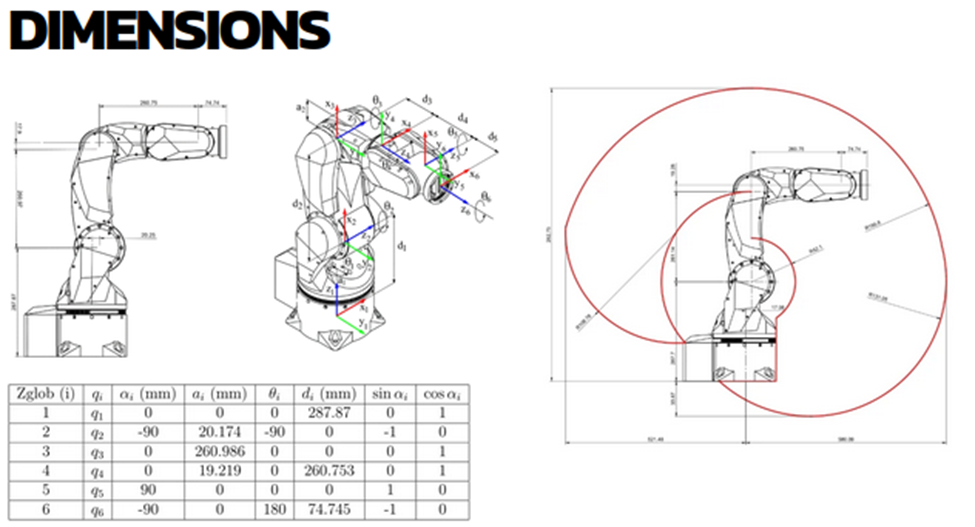
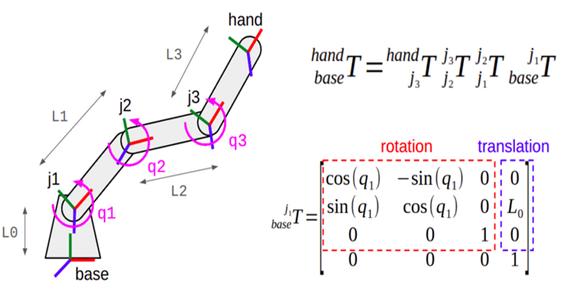
- อัลกอริทึมการคำนวณ: ใช้ Forward Kinematics สำหรับหาพิกัดปัจจุบัน และ Jacobian Matrix สำหรับการเคลื่อนที่ใน Task Space
- การจัดการ Singularity: ใช้เทคนิค Pseudo-inverse Jacobian และ Damped Least Squares เพื่อลดอาการกระตุกและหน่วงความเร็วเมื่อหุ่นยนต์เคลื่อนที่เข้าใกล้จุดบอด (Singularity)
- การวางแผนงาน (Task Planning): ใช้ระบบ State Machine ร่วมกับการค้นหาแบบ BFS (Breadth-First Search) เพื่อคำนวณลำดับการทำงานที่สั้นที่สุดสำหรับการชงกาแฟ
3 ระบบการมองเห็นและปัญญาประดิษฐ์ (Vision & AI)
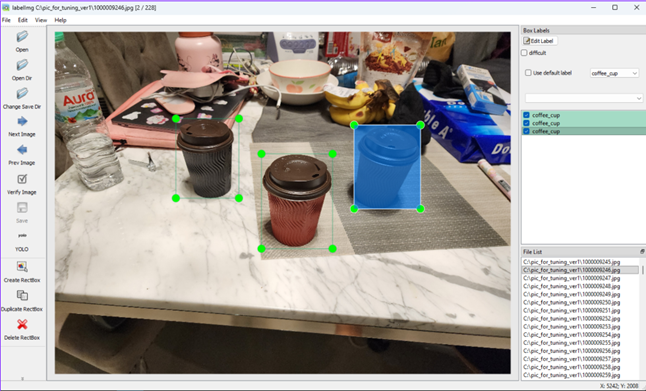
- การตรวจจับแก้ว (Cup Detection): ใช้โมเดล YOLOv8 (YOLO26n) ที่ผ่านการทำ Fine-tuning เพื่อตรวจจับแก้วกาแฟโดยเฉพาะ ทำงานร่วมกับ ArUco Marker เพื่อใช้เป็นจุดอ้างอิงระนาบโต๊ะ ซึ่งช่วยให้แปลงพิกัดจากภาพ 2 มิติ เป็นตำแหน่ง 3 มิติบนโลกจริงได้แม่นยำกว่าการใช้กล้อง Depth เพียงอย่างเดียว
- ระบบความปลอดภัย (Safety Vision): ใช้กล้อง Stereo Camera และ Media Pipe Holistic เพื่อดึงพิกัดร่างกายมนุษย์มาสร้างเป็น 3D Skeleton เพื่อติดตามการเคลื่อนไหวของคนในพื้นที่ทำงานและกำหนดโซนความปลอดภัย (Safe/Warning/Danger)
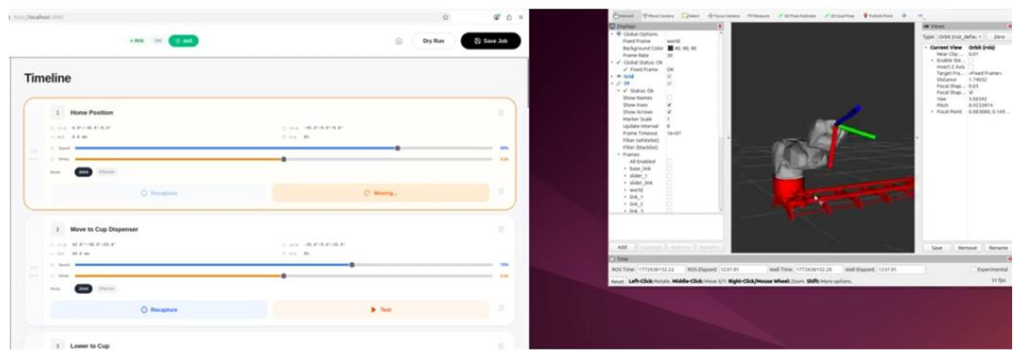
4 ส่วนต่อประสานผู้ใช้และฝาแฝดดิจิทัล (Web UI & Digital Twin)
- เทคโนโลยีเว็บ: พัฒนาด้วย Next.js, React, TypeScript และ Tailwind CSS เพื่อสร้างหน้าจอควบคุมที่ทันสมัย สื่อสารกับหุ่นยนต์ผ่าน ROS Bridge บนโปรโตคอล WebSocket แบบ Real-time
- 3D Digital Twin: พัฒนาด้วย Three.js เพื่อสร้างแบบจำลองเสมือนจริงของหุ่นยนต์บนหน้าเว็บ ผู้ใช้สามารถตรวจสอบท่าทาง จำลองการทำงาน (Simulation) ก่อนสั่งงานจริง และตั้งค่าพารามิเตอร์ต่างๆ ของหุ่นยนต์ได้โดยไม่ต้องเขียนโค้ด
5 กระบวนการพัฒนา (Progression)
การพัฒนามีการทำซ้ำและปรับปรุงเป็นเวอร์ชันต่างๆ โดยแบ่งออกเป็นช่วงๆดังนี้
ช่วงเวอร์ชัน 1-3: เริ่มต้นทดสอบ Kinematics พื้นฐาน และเพิ่มระบบ P Control เพื่อให้หุ่นยนต์เคลื่อนที่ได้อย่างนุ่มนวล (เร่งความเร็วตอนเริ่มและเบาลงก่อนถึงเป้าหมาย)
ช่วงเวอร์ชัน 5-6: ปรับแก้แกนหมุนให้ตรงตามมาตรฐาน DH Table และพัฒนาระบบการ Jog ผ่านปุ่มบนหน้าเว็บ
ช่วงการแก้ปัญหาเฉพาะหน้า: ปรับปรุงระยะขบของเกียร์ 3D Print ให้เหมาะสม และกระจายโหลดการประมวลผลจาก Jetson Nano ไปยังคอมพิวเตอร์เครื่องอื่นเพื่อให้ระบบทำงานได้ทาง web ควบคุม
4.ปัญหาที่พบและแนวทางแก้ไข
ระหว่างการพัฒนาโครงการ FIBO ROBOT CAFE ทีมวิศวกรได้เผชิญกับอุปสรรคสำคัญในการเปลี่ยนจากแบบจำลองในคอมพิวเตอร์ให้กลายเป็นหุ่นยนต์ที่ใช้งานได้จริง ซึ่งต้องอาศัยการตัดสินใจแก้ไขปัญหาทางวิศวกรรมเพื่อให้โครงการสำเร็จตามกำหนดเวลา โดยปัญหาหลักและแนวทางแก้ไขมีดังนี้ครับ:
1. ระยะขบของเกียร์ 3D Print ไม่พอดี
- ปัญหา: ชิ้นส่วนเกียร์แบบ Herringbone ที่ผลิตจากเครื่องพิมพ์ 3 มิติ มีความคลาดเคลื่อนทางขนาด (Tolerance) ทำให้บางชิ้นขบกันแน่นเกินไปจนมอเตอร์หมุนไม่ไหว และบางชิ้นหลวมเกินไปจนเกิดระยะคลอน (Backlash)
- แนวทางแก้ไข: ทีมงานใช้วิธี Iterative Design โดยการปรับแก้โมเดลและพิมพ์ชิ้นส่วนออกมาทดสอบซ้ำหลายเวอร์ชัน จนกว่าจะพบระยะที่เฟืองสามารถขบและส่งกำลังได้อย่างลื่นไหลที่สุด
2. บอร์ดขับมอเตอร์เสียหายกะทันหัน
- ปัญหา: ชุดขับมอเตอร์เสียระหว่างการทดสอบ หากสั่งอะไหล่เดิมจากต่างประเทศจะล่าช้าและไม่ทันกำหนดส่งมอบโครงการ
- แนวทางแก้ไข: เปลี่ยนไปใช้บอร์ด TB6600 Micro Stepper Motor จำนวน 2 ตัว เพื่อควบคุม 2 ข้อต่อสุดท้าย แทนบอร์ดเดิมที่เสียหาย
- ผลกระทบ: การเปลี่ยนบอร์ดทำให้การจัดสายไฟมีความซับซ้อนขึ้นมาก จากเดิมที่ใช้สายไฟเพียง 4 สาย (ระบบ CAN bus) ต้องเปลี่ยนมาเดินสายสัญญาณและสายมอเตอร์เพิ่มขึ้นเป็น 14-16 สาย เพื่อรองรับระบบใหม่
3. ข้อจำกัดด้านทรัพยากรของบอร์ดประมวลผล (Jetson Nano)
- ปัญหา: บอร์ด Jetson Nano มีสเปคไม่เพียงพอต่อการรันโมเดล AI สองระบบพร้อมกัน (ระบบตรวจจับแก้วและระบบความปลอดภัย) ทำให้ความเร็วในการแสดงผล (Frame Rate) ตกอย่างหนักจนภาพกระตุก ไม่สามารถใช้งานได้จริง,
- แนวทางแก้ไข: ใช้การ กระจายโหลด (Load Balancing) โดยให้บอร์ด Jetson Nano รับหน้าที่คำนวณ AI เฉพาะส่วนที่ใช้จับแก้วเท่านั้น และนำคอมพิวเตอร์อีกเครื่องหนึ่งมาช่วยประมวลผลระบบ Vision for Safety แยกต่างหาก ช่วยให้ระบบกลับมาทำงานได้อย่างลื่นไหล
6.สรุปและข้อเสนอแนะในการพัฒนาต่อในอนาคต
บทสรุปและข้อเสนอแนะสำหรับแนวทางการพัฒนาโครงการ FIBO ROBOT CAFE ในอนาคต มีรายละเอียดดังนี้
6.1 สรุปผลการดำเนินงาน
โครงการนี้สามารถพัฒนาต้นแบบหุ่นยนต์ผู้ช่วยบาริสต้าที่ทำงานผ่านระบบ Robot Arm Web UI ได้สำเร็จ โดยมีการบูรณาการเทคโนโลยีแขนกล, 3D Digital Twin, โครงข่าย ROS และระบบ AI Vision เข้าด้วยกัน. ผลการทดสอบมีประเด็นสำคัญดังนี้:
- ระบบประมวลผลภาพ (AI Vision): สามารถตรวจจับแก้วและ ArUco marker พร้อมกันได้สำเร็จถึง 89.00% โดยมีความแม่นยำของตำแหน่งบนโต๊ะสูง (ค่าเบี่ยงเบนมาตรฐานในแกน X และ Y ไม่เกิน 0.71 mm). อย่างไรก็ตาม ความเร็วบนบอร์ด Jetson Nano ยังทำได้เพียง 4.56 FPS เนื่องจากข้อจำกัดด้านฮาร์ดแวร์.
- ระบบควบคุมและกลไก (Kinematics & Control): ระบบ Task Planning สามารถหาเส้นทางที่สั้นที่สุดได้เร็วถึง 0.1 ms. แต่ยังพบปัญหาชิ้นส่วนเกียร์จากการพิมพ์ 3D ที่มักขัดข้อง และความเร็วในการสั่งงานแบบ Task Space ยังไม่สัมพันธ์กับความเร็วจริงของมอเตอร์.
6.2 ข้อเสนอแนะในการพัฒนาต่อในอนาคต
เพื่อให้ระบบมีประสิทธิภาพและเสถียรภาพมากขึ้นในเฟสถัดไป ทีมพัฒนาได้ให้ข้อเสนอแนะไว้ดังนี้:
1. ด้านฮาร์ดแวร์และกลไก
- ปรับปรุงความแม่นยำชิ้นส่วน: ควรเปลี่ยนไปใช้วัสดุหรือกระบวนการผลิตที่มีความแม่นยำสูงกว่าการพิมพ์ 3D ทั่วไป สำหรับชิ้นส่วนส่งกำลังเพื่อลดปัญหาเฟืองขัดข้อง.
- อัปเกรดหน่วยประมวลผล: ควรเปลี่ยนจาก Jetson Nano รุ่นเก่าไปใช้บอร์ดรุ่นใหม่ที่มีประสิทธิภาพสูงกว่า หรือคอมพิวเตอร์ปกติ เพื่อให้สามารถประมวลผลภาพได้ที่เฟรมเรตสูงสุดตามสเปคของกล้อง.
2. ด้าน AI Vision
- การเร่งความเร็ว (Optimization): ควรนำ TensorRT มาใช้งานบน Edge Device เพื่อเร่งการประมวลผลของ GPU.
- ปรับแต่งโมเดล: เลือกใช้โมเดล YOLO ขนาดที่เล็กกว่าเดิม (เช่น Nano หรือ Pico) หรือใช้วิธี Model Distillation เพื่อลดภาระการคำนวณของระบบ.
3. ด้านระบบควบคุม
- ระบบควบคุมแบบปิด (Closed-Loop Control): ควรนำค่าจากเซนเซอร์แม่เหล็ก (AS5600) มาใช้เป็น Feedback เพื่อตรวจสอบและชดเชยความเร็วมอเตอร์ให้สัมพันธ์กับสมการควบคุม.
- Hand-Eye Calibration: เพิ่มกระบวนการสอบเทียบกล้องอัตโนมัติ เพื่อลดความคลาดเคลื่อนในการกะระยะความลึกในแกน Z.
4. ด้าน Web UI และ Digital Twin
ระบบเฝ้าระวังแรงบิด: พัฒนาให้ Digital Twin สามารถคำนวณและแสดงค่า แรงบิด (Torque) ของแต่ละข้อต่อแบบ Real-time เพื่อป้องกันการใช้งานมอเตอร์เกินขีดจำกัด.
สิ่งอำนวยความสะดวกสำหรับผู้พิการ: พัฒนาระบบ สั่งงานด้วยเสียง (Voice Control) หรือสร้างปุ่ม Macro ที่รวมคำสั่งซับซ้อนไว้ในการกดเพียงครั้งเดียว.
ข้อมูลการพัฒนาโดยละเอียด
การออกแบบทางกล (Mechanical Design) ของ FIBO ROBOT CAFE
การออกแบบระบบตรวจจับแก้วของ FIBO ROBOT CAFE
การใช้งานและผลการทดสอบ FIBO ROBOT CAFE

Robot Arm Web UI FIBO ROBOT CAFE
6.สิ่งที่ได้เรียนรู้
จากการทำโครงงาน FIBO ROBOT CAFE ทีมผู้พัฒนาได้รับประสบการณ์ที่มีค่ามากกว่าเพียงแค่การประกอบหุ่นยนต์ให้เคลื่อนที่ได้ แต่คือการเรียนรู้ที่จะบูรณาการระบบที่ซับซ้อนเข้าด้วยกัน (System Integration) และการเผชิญกับตัวแปรหน้างานที่ทฤษฎีในห้องเรียนไม่เคยบอกไว้ โดยสามารถสรุปสิ่งสำคัญที่ได้เรียนรู้ดังนี้
1. ระบบประมวลผลภาพและคอมพิวเตอร์ขนาดเล็ก (AI Vision & Edge Computing)
- ข้อจำกัดของฮาร์ดแวร์: ทีมงานได้เรียนรู้ว่าสเปคของกล้องเพียงอย่างเดียวไม่สามารถรับประกันความลื่นไหลของระบบได้ เมื่อต้องประมวลผล AI หนักๆ บนบอร์ดขนาดเล็กอย่าง Jetson Nano จนทำให้เฟรมเรตตก
- การแก้ปัญหาด้วยซอฟต์แวร์: การใช้เทคนิค Software Optimization เช่น การลดขนาดภาพ (Downscaling) และการประมวลผลแบบข้ามเฟรม เป็นวิธีที่มีประสิทธิภาพในการบริหารทรัพยากรที่มีจำกัด
- ความสำคัญของการสอบเทียบ: พบว่าการกะระยะความลึก (แกน Z) มีความคลาดเคลื่อนสูงเกือบ 20% ทำให้เห็นความสำคัญอย่างยิ่งของการทำ Camera Calibration เพื่อความแม่นยำในการหยิบจับ
2. กลไกและการประกอบฮาร์ดแวร์ (Mechanics & Hardware)
- ความละเอียดคือหัวใจ: การผลิตชิ้นส่วนด้วยเครื่องพิมพ์ 3 มิติ สอนให้รู้ว่าความคลาดเคลื่อนเพียงแค่ 1 มิลลิเมตร ก็สามารถทำให้กลไกเฟืองขัดกันจนมอเตอร์หมุนไม่ได้ การออกแบบจึงต้องเผื่อระยะ (Tolerance) ให้เหมาะสมเสมอ
3. ระบบควบคุมและจลนศาสตรศาสตร์ (Control & Kinematics)
- ทฤษฎี vs ความจริง: การคำนวณสมการในคอมพิวเตอร์อาจดูสมบูรณ์แบบ แต่เมื่อสั่งงานจริงความเร็วของมอเตอร์อาจไม่สัมพันธ์กัน ทำให้รู้ว่าการควบคุมแบบ Open-loop นั้นไม่เพียงพอ และจำเป็นต้องมี Closed-loop control โดยใช้เซนเซอร์ป้อนกลับเพื่อให้การเคลื่อนที่แม่นยำขึ้น
4. สถาปัตยกรรมระบบและซอฟต์แวร์ (System Architecture & Software)
- ประโยชน์ของ Digital Twin: การสร้างแบบจำลองเสมือนจริง (Simulation) ช่วยป้องกันความเสียหายของฮาร์ดแวร์ได้มาก เพราะสามารถทดสอบการวางแผนเส้นทางได้ล่วงหน้าก่อนจะประกอบหุ่นยนต์จริงเสร็จ
- การวางระบบแบบแยกส่วน: การออกแบบระบบแบบ Distributed System ที่แยกการทำงานของกล้อง, ROS Bridge และ Web UI ออกจากกัน ช่วยให้การค้นหาจุดบกพร่อง (Debug) ทำได้ง่ายและตรงจุด
5. การนำไปต่อยอดในอนาคต
งานวิศวกรรมอุตสาหกรรม: ประสบการณ์จากการเชื่อมโยงระบบที่หลากหลายนี้ เป็นทักษะสำคัญในการพัฒนาระบบโรงงานอัจฉริยะ (Smart Factory) หรือการสร้าง Dashboard ควบคุมเครื่องจักรจากระยะไกล
เทคโนโลยีเพื่อสังคม: แนวคิดหุ่นยนต์ผู้ช่วยที่สั่งงานง่ายผ่านหน้าเว็บ สามารถนำไปพัฒนาเป็น เทคโนโลยีสิ่งอำนวยความสะดวก (Assistive Technology) สำหรับผู้พิการหรือผู้สูงอายุได้จริงในอนาคต
7.ลิงค์ Source code
Arm kinematic and task planning: https://github.com/IsaacDisnaut/Robot_Arm
Motor control & Wiring: https://github.com/phattanaratjeedjeen-sudo/canbus_ws
Robot UI : https://github.com/domeIttiwat/robotARM-ui
Cup detection vision: https://github.com/panithiseehawong/Grap_cup
8.เอกสารอ้างอิง
- https://arctosrobotics.com/?v=07159c47ee1b
- https://www.researchgate.net/publication/3331775_Review_of_the_Damped_Least-squares_Inverse_Kinematics_with_Experiments_on_an_Industrial_Robot_Manipulator
- https://github.com/makerbase-motor/MKS-SERVO42D-57D
- https://github.com/micro-ROS
- https://github.com/ultralytics/ultralytics
- https://arxiv.org/html/2509.17345v1
- https://docs.ultralytics.com/models/yolo26
- https://docs.opencv.org/3.4/d9/d6a/group__aruco.html
- https://www.sciencedirect.com/science/article/pii/S0160791X24001180
- https://www.cafexapp.com/
รายชื่อสมาชิกและหน้าที่ที่รับผิดชอบ
| ชื่อ – นามสกุล | ความรับผิดชอบในทีม |
| นาย วัฒนชัย ผาคำ | Robot Gripper, Vision For Safety, Robot assembly,Support Motor Control |
| นาย พัฒนรัตน์ จีดจีน | Motor control, Wiring , ROS control |
| นาย ตวัน ทองศุภโชค | Kinematics, Task planning,Robot assembly |
| นาย แพร่พร้อมพงศ์ ยานะวิน | Robot assembly , Support Vision , Data Compilation |
| นาย อิทธิวัตร รัตตกูล | Web UI , Database, Digital Twin, Support Vision For Safety ,Assembly robot |
| นาย ปณิธิ สีหะวงษ์ | Detection model for detecting a coffee cup in the workplace |

นาย วัฒนชัย ผาคำ

นาย พัฒนรัตน์ จีดจีน

นาย ตวัน ทองศุภโชค

นาย แพร่พร้อมพงศ์ ยานะวิน

นาย อิทธิวัตร รัตตกูล

นาย ปณิธิ สีหะวงษ์