จากโพสต์ FIBO ROBOT CAFE ผมจะมารีวิวและสรุปความรู้ที่ได้จากการทำโปรเจกต์ FIBO ROBOT CAFE ซึ่งเป็นการนำความรู้จากวิชา Foundation of Robotics (FRA631) และเรื่อง Human-Robot Interaction (HRI) มาประยุกต์ใช้จริงครับในโปรเจกต์นี้ ผมได้รับผิดชอบหลักในส่วนของ โครงสร้างทางกล (Mechanics) และการออกแบบระบบ โดยมี 3 ประเด็นหลักที่ผมได้เรียนรู้ ดังนี้ครับ
1. งาน Hardware และกลไกการขับเคลื่อน (Robotics Integration)
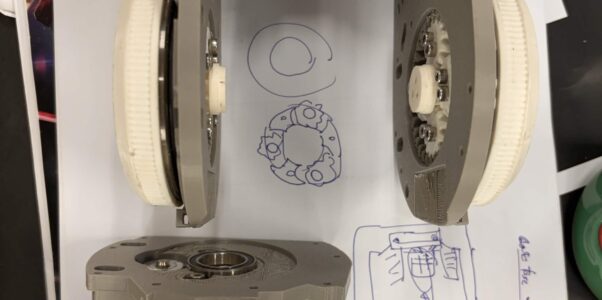
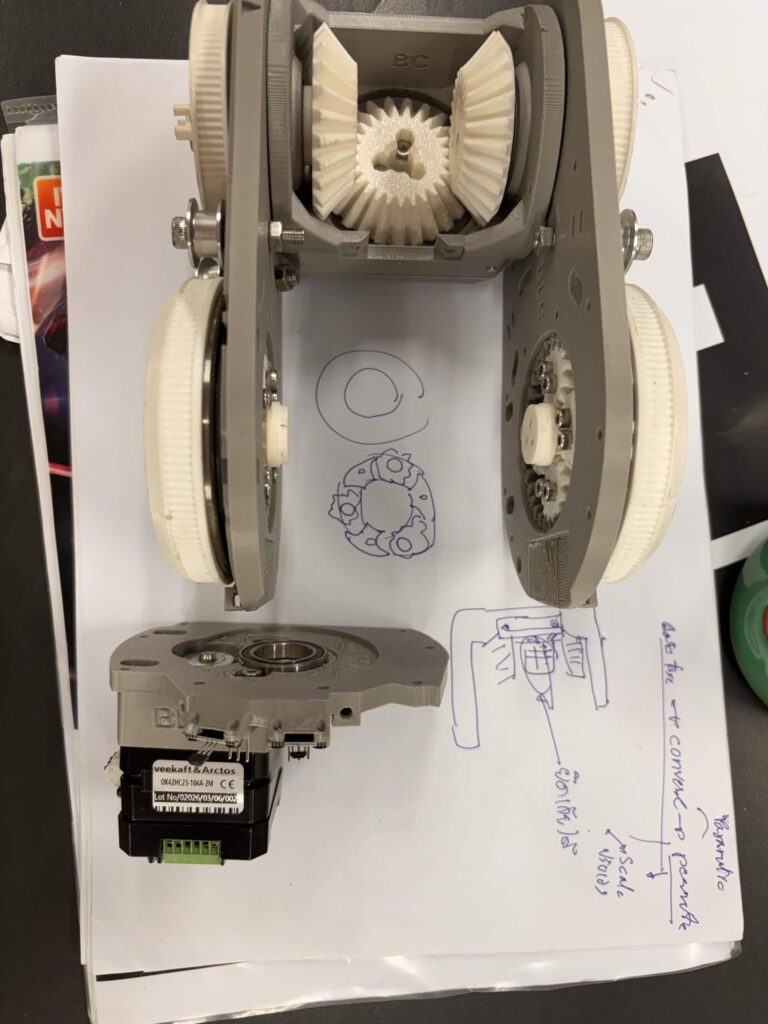
- หน้าที่: ผมได้เข้าไปช่วยซัพพอร์ตในส่วนของการประกอบ ฐานหุ่นยนต์ (Robot Base) และ กลไกเฟืองขับเคลื่อน (Gear Mechanism) โดยนำชิ้นส่วนที่พิมพ์ 3D จากโมเดลของ Arctos Robotics มาประกอบและค่อยแก้ไขปรับเป็นระยะๆ
- ความรู้ที่ได้: การประกอบส่วนฐานและเฟืองทำให้ผมเข้าใจซึ้งถึงคำว่า “ความแม่นยำของชิ้นงาน (Mechanical Tolerance)” ครับ โดยเฉพาะเรื่องการขบกันของเฟือง (Gear Alignment) ถ้าระยะการประกอบเบี้ยวหรือหลวมไปนิดเดียว มันจะส่งผลให้โครงสร้างหุ่นยนต์ไม่นิ่ง และกระทบไปถึงความแม่นยำในการคำนวณ Kinematics ทันที แม้ผมจะไม่ได้เป็นคนเขียนโค้ดระบบหลัก แต่การได้ลุยงาน Hardware ส่วนรากฐานนี้ ก็ทำให้ผมเห็นภาพรวมชัดเจนว่า โครงสร้างทางกลที่แน่นหนาและแม่นยำ คือจุดเริ่มต้นสำคัญที่ทำให้ Firmware และ Software ทำงานสอดประสานกันได้อย่างราบรื่นครับ แต่ว่าความเป็นจริงนั้นหนักกว่าที่วาดไว้555
2. การออกแบบ 3D เพื่อแก้ปัญหาหน้างาน (Fusion 360)
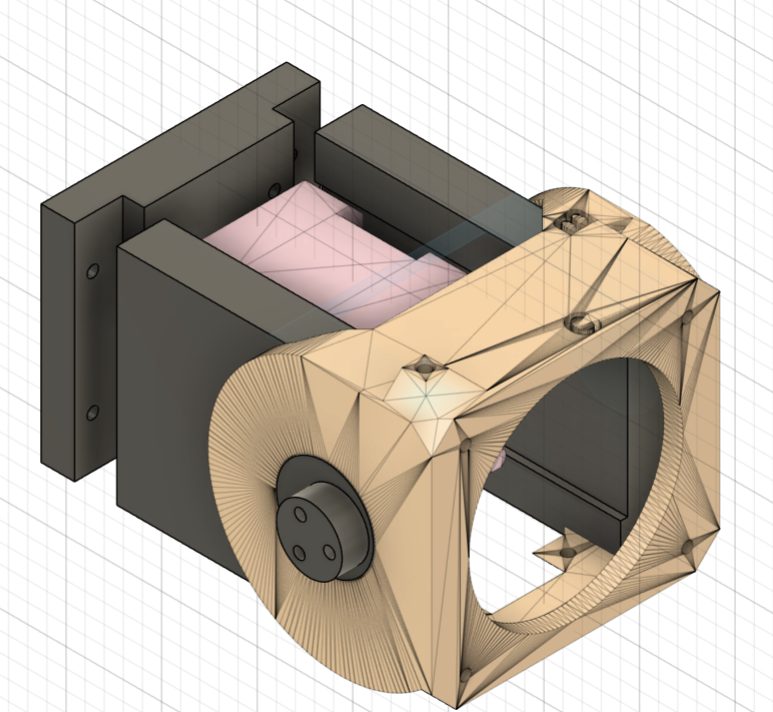
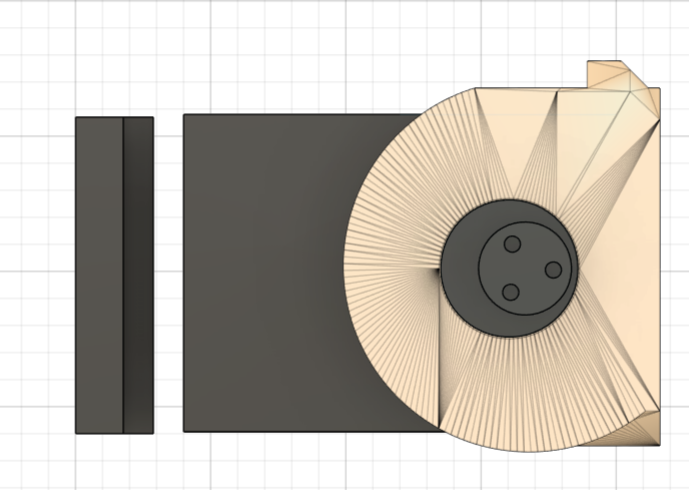
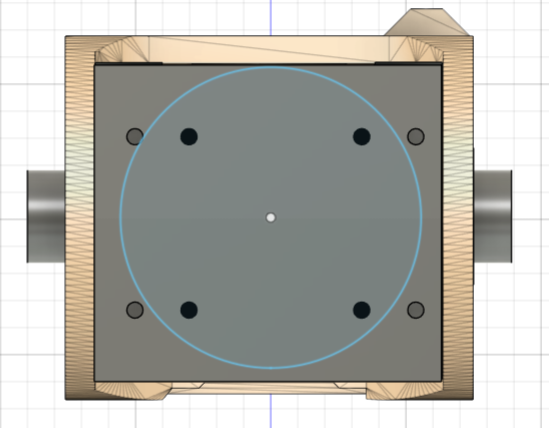
- หน้าที่: ผมดูแลการเขียนแบบและจำลองโมเดล 3D สำรองไว้ในโปรแกรม Fusion 360 เพื่อเตรียมพร้อมกรณีที่หน้างานต้องปรับแก้ชิ้นส่วนแบบกะทันหัน
- ความรู้ที่ได้: ผมได้ฝึกทักษะ Design for Flexibility หรือการออกแบบที่พร้อมรับการเปลี่ยนแปลงตลอดเวลา ได้เรียนรู้วิธีจัดการข้อจำกัดเรื่องพื้นที่การทำงานของหุ่นยนต์ และเห็นความเชื่อมโยงตั้งแต่การปั้นโมเดล CAD ไปจนถึงการนำไปปริ้น 3D เพื่อแก้ปัญหาทางกายภาพหน้างานให้ไวที่สุด แต่จริงๆแล้วผมพึ่งได้ลองเขียนใน Fusion 360 เป็นครั้งแรกจริงๆจังๆ ซึ่งปกติผมจะ ใช้ SOLIDWORKS กับ AutoCAD เลยทำให้ตอนแรกๆงงกับการใช้เครื่องมือใน Fusion ต้องขอขอบคุณ https://www.youtube.com/watch?v=6NzpWLwEFKw แม้ว่าจะไม่ทันได้ใช้งานเพราะติดปัญหาทางด้านเวลา แต่ก็ได้ความเข้าใจในการเขียน CAD ใน Fusion
3. การออกแบบโดยคำนึงถึงคน (HRI & Safety)
- หน้าที่: คอนเซปต์หลักของเราคือการทำ “หุ่นยนต์ผู้ช่วย” ที่ทำงานร่วมกับคน (Human-Robot Collaboration) ไม่ใช่หุ่นยนต์ที่มาแทนที่คน
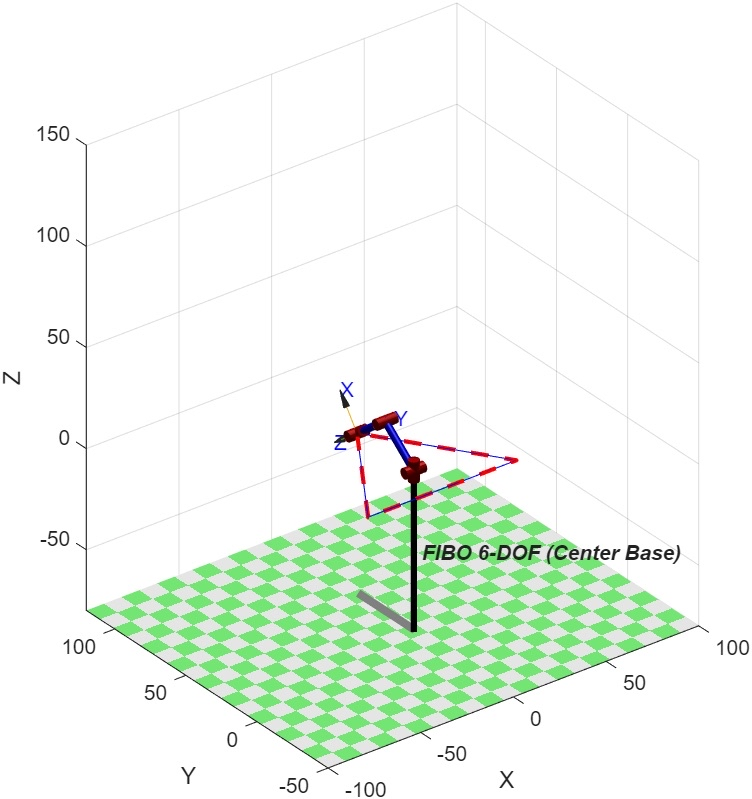
- ความรู้ที่ได้: ผมได้เรียนรู้ว่างานฝั่งกลไกมีผลโดยตรงต่อความรู้สึกและความปลอดภัยของผู้ใช้งานครับ ตัวอย่างเช่น การตัดสินใจเลือกใช้วัสดุที่มีความยืดหยุ่น (TPU) ในส่วนที่ต้องสัมผัสกับแก้ว หรือการออกแบบโดยคิดถึง “ระยะการเอื้อมถึง (Reach)” เพื่อให้หุ่นยนต์ที่เราสร้างขึ้นมามีสัดส่วนที่ปลอดภัย ทำงานร่วมกันได้จริง และง่ายต่อการจับประคอง (Hand-Guided) ครับ ผมเลยเขียน 3D แกนแขน 6 แกนใน Mathlab เพื่อจำลองระยะ เอื้อม ของแขนดูครับ ซึ่งจะนำส่วนนี้ไปเป็นตัวอย่างให้ฝ่ายโปรแกรมควบคุมหลักเห็นภาพรวมของการเคลื่อนที่ได้

นาย แพร่พร้อมพงศ์ ยานะวิน