
จะใช้กล้อง Web camera สองตัวยี่ห้อ Fanteach รุ่น LuminousC50 2 ตัว กล้องทั้งสองส่องไปที่หุ่นปรับตั้งให้เห็นทั้งคน และ หุ่น โดย Setup ที่ใช้มีดังนี้
-กล้องซ้าย อยู่ที่ความสูง 1.74 เมตร ทำมุม 290 องศากับระนาบของหุ่น
-กล้องขวา อยู่ที่ความสูง 1.79 เมตรทำมุม 110 องศากับระนาบของหุ่น
-ระยะห่างระหว่าง 2 กล้อง(วัดจากจุดศูนย์กลางของกล้องทั้งสองตัวเทียบกัน) 1.95 เมตร
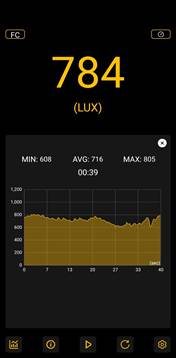
-ค่าความสว่างวัดจากพื้นขึ้นมา 0.74 ถึงเครื่องวัด(ในที่นี้วัดด้วยแอปพลิเคชั่น Light Meter ด้วย smart phone ยี่ห้อ Samsung รุ่น S24FE)
ค่าความสว่างอยู่ที่ Min:608 Lux. AVG:716 Lux. Max:805 Lux.
โดยการใช้งานในโปรแกรมจะมีให้เลือกกล้องแล้วจะให้ทำการ calibrate โดยใช้ ChAruco board ดังรูป โดยโปรแกรมจะเก็บตัวอย่างทั้งหมด 50 รูป แล้วนำไปคำนวณ เมื่อคำนวณเสร็จแล้วสามารถใช้งานได้ทันที

รูปโปรแกรมที่ใช้งาน(ฝั่ง computer ตอนใช้งานปกติจะรันอยู่บน jetson nano ไม่มีการแสดงผล ส่วนจอทัชสกรีนความมือจะแสดงผลและควบคุมการใช้งาน) โดยโปรแกรมจะทำการ Track จุดทั้งหมด 11 จุด 0 Nose,11 L.Shoulder,12 R.Shoulder,13 L.Elbow,14 R.Elbow,15 L.Wrist,16 R.Wrist,23 L.Hip,24 R.Hip,27 L.Ankle,28 R.Ankle104 ,landmark[4]
Thumb (ปลายนิ้วหัวแม่มือ),108 landmark[8] Index (ปลายนิ้วชี้) โดยนิ้วชี้กับนิ้วโป้งจะควบคุมองศา Gripper

รูปการ Setting อุปกรณ์

รูปเส้นที่ใช้วัดระยะ

รูปเส้นที่ใช้วัดระยะ
ตารางค่าความคาดเคลื่อนระยะจริงกับระยะที่วัดได้ในโปรแกรม
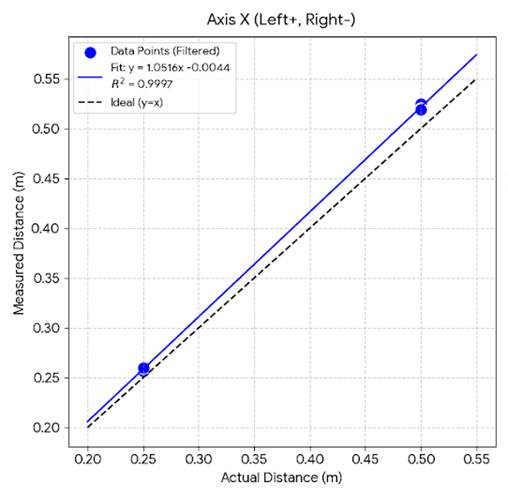
การทดลองใช้เป็นการเก็บค่าจุดสองจุดที่รู้ระยะระหว่างกันแล้ว เทียบกับระยะที่โปรแกรมวัดได้
แกน X (ซ้าย+,ขวา-)
| ลำดับ | ระยะจริง (Actual – m) | ระยะห่างรวมที่วัดได้ (Measured – m) | Error (%) | ΔX (m) | ΔY (m) | ΔZ (m) |
| 1 | 0.2500 | 0.2597 | +3.9% | 0.2585 | 0.0214 | 0.0130 |
| 2 | 0.2500 | 0.2583 | +3.3% | 0.2568 | 0.0231 | 0.0147 |
| 3 | 0.2500 | 0.2629 | +5.2% | 0.2603 | 0.0288 | 0.0236 |
| 4 | 0.5000 | 0.5306 | +6.1% | 0.5253 | 0.0574 | 0.0475 |
| 5 | 0.5000 | 0.5240 | +4.8% | 0.5202 | 0.0500 | 0.0380 |
| 6 | 0.5000 | 0.5227 | +4.5% | 0.5188 | 0.0508 | 0.0386 |
แกน Z (หน้า+,หลัง-)
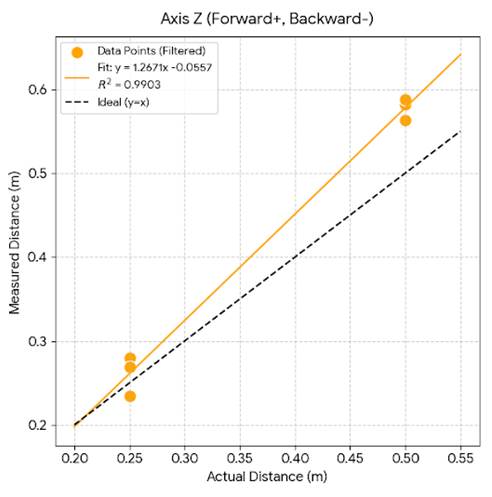
| ลำดับ | ระยะจริง(Actual – m) | ระยะห่างรวมที่วัดได้(Measured – m) | Error (%) | ΔX (m) | ΔY (m) | ΔZ (m) |
| 1 | 0.2500 | 0.2907 | +16.3% | 0.0443 | 0.0659 | 0.2796 |
| 2 | 0.2500 | 0.2763 | +10.5% | 0.0256 | 0.0572 | 0.2691 |
| 3 | 0.2500 | 0.2380 | -4.8% | 0.0235 | 0.0338 | 0.2344 |
| 4 | 0.5000 | 0.6018 | +20.4% | 0.0743 | 0.1334 | 0.5821 |
| 5 | 0.5000 | 0.5797 | +15.9% | 0.0674 | 0.1208 | 0.5630 |
| 6 | 0.5000 | 0.6088 | +21.8% | 0.0750 | 0.1373 | 0.5883 |
แกน Y (บน+,ล่าง-)
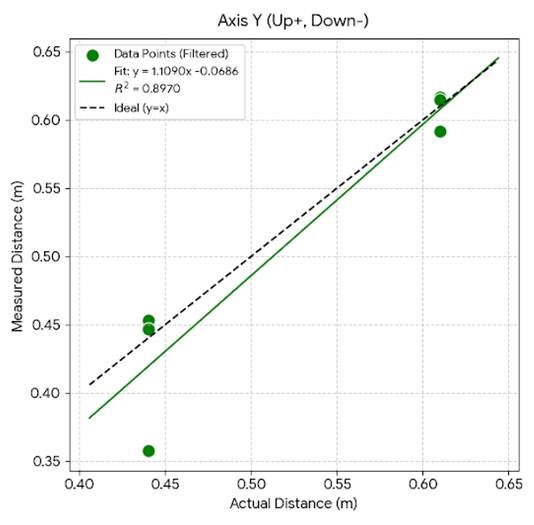
| ลำดับ | ระยะจริง(Actual – m) | ระยะห่างรวมที่วัดได้(Measured – m) | Error (%) | ΔX (m) | ΔY (m) | ΔZ (m) |
| 1 | 0.6100 | 0.6052 | -0.8% | 0.0088 | 0.5919 | 0.1259 |
| 2 | 0.6100 | 0.6197 | +1.6% | 0.0065 | 0.6169 | 0.0578 |
| 3 | 0.6100 | 0.6173 | +1.2% | 0.0027 | 0.6148 | 0.0557 |
| 4 | 0.4400 | 0.4551 | +3.4% | 0.0372 | 0.4534 | 0.0106 |
| 5 | 0.4400 | 0.4504 | +2.4% | 0.0501 | 0.4470 | 0.0226 |
| 6 | 0.4400 | 0.4006 | -8.9% | 0.0548 | 0.3576 | 0.1722 |
ภาพรวมการวิเคราะห์ (Overview)
ผลการวิเคราะห์แต่ละแกน (Axis Analysis)
1.แกน X (ซ้าย – ขวา) แกนนี้หุ่นยนต์กะระยะซ้ายขวาได้แม่นยำมากใกล้เคียงกับการใช้ตลับเมตรวัด ค่าที่วัดได้กว้างกว่าความเป็นจริงไป ประมาณ 5%
2. แกน Y (บน – ล่าง) แกนนี้มีการบอกระยะสูงต่ำมีความคลาดเคลื่อนบ้าง แต่โดยเฉลี่ยแล้วมันจะมองเห็นของอยู่ สูง/ต่ำกว่าความเป็นจริงไปประมาณ 11%
3.แกน Z (ตื้น – ลึก) แกนนี้ค่อนข้างผิดเพี้ยนสูง ประมาณ 20%
***หมายเหตุ***
Measured (m): คือ ระยะกระจัดรวมในรูปแบบ 3 มิติ ที่ระบบกล้องคำนวณจากพีทากอรัส
ΔX, ΔY, ΔZ (m): คือ ระยะห่างเฉพาะของแกนนั้นๆ (เงาตกกระทบในแต่ละแกน) เทียบกับตำแหน่งกล้อง
Error (%) คำนวณจากระยะกระจัดรว(Measured) เทียบกับค่าที่วัดได้
กราฟแสดงประสิทธิภาพของระบบ Safety Vision
การทดสอบใช้เวลา 1 นาที 22 วินาที จับค่า FPS ใช้ภาพขนาด 1080p เก็บค่าทั้งหมด 702 frame
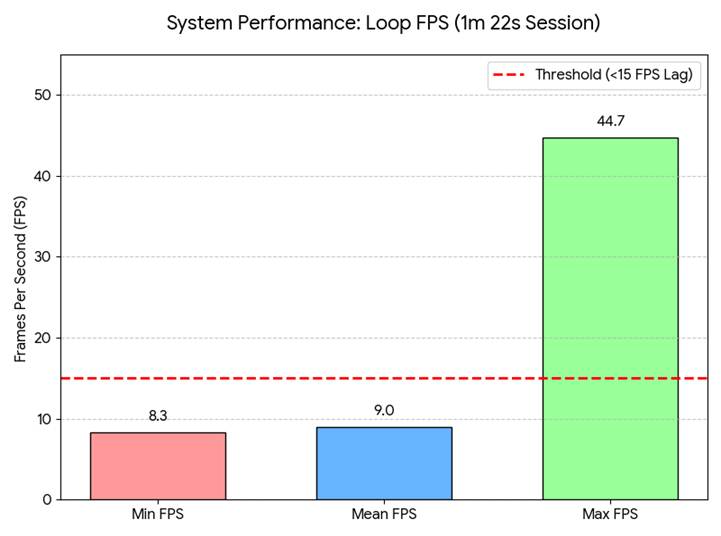
ภาพรวมการวิเคราะห์ (Overview)
ค่าเฉลี่ย (Mean FPS): 9.0 FPS ซึ่งต่ำกว่าเส้นเกณฑ์มาตรฐานสีแดง (15 FPS)
ค่าต่ำสุด (Min FPS): อยู่ที่ 8.3 FPS ระบบหน่วงที่ระดับ 8-9 FPS เกือบตลอดเวลา
ค่าสูงสุด (Max FPS): ทำได้ 44.7 FPS แต่จะเกิดขึ้นแค่สั้นๆ ไม่กี่เฟรม
โดยภาพรวมระบบยังมีความกระตุกอยู่สามารถใช้งานได้แค่ทั่วไปเท่านั้น
หมายเหตุ: ถ้า FPS ต่ำกว่าเส้นประสีแดงที่ระดับ 15 FPS จะทำให้ภาพกระตุก