FRA631 Foundation of Robotics Class project 68340700411 แพร่พร้อมพงศ์ ยานะวิน
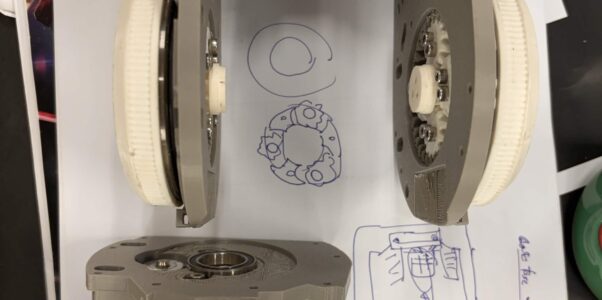
จากโพสต์ FIBO ROBOT CAFE ผมจะมารีวิวและสรุปความรู้ที่ได้จากการทำโปรเจกต์ FIBO ROBOT CAFE ซึ่งเป็นการนำความรู้จากวิชา Foundation of Robotics (FRA631) และเรื่อง Human-Robot Interaction (HRI) มาประยุกต์ใช้จริงครับในโปรเจกต์นี้ ผมได้รับผิดชอบหลักในส่วนของ โครงสร้างทางกล (Mechanics) และการออกแบบระบบ โดยมี 3 ประเด็นหลักที่ผมได้เรียนรู้ ดังนี้ครับ 1. งาน Hardware และกลไกการขับเคลื่อน (Robotics Integration) 2. การออกแบบ 3D …