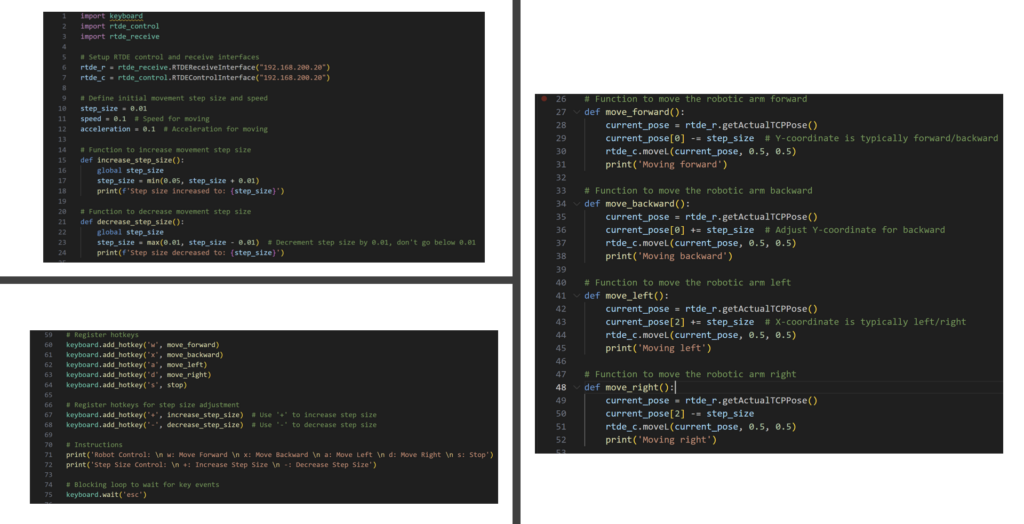
การควบคุมแขนกลโรบอทผ่าน RTDE (Real-Time Data Exchange) ในสภาพแวดล้อม Python โดยใช้โมดูล keyboard, rtde_control, และ rtde_receive หลักการทำงานมีดังนี้:
- ตั้งค่าอินเทอร์เฟซสำหรับ RTDE: สร้างการเชื่อมต่อทั้งการควบคุมและการรับข้อมูลกับโรบอท โดยใช้ที่อยู่ IP
192.168.200.20เพื่อสื่อสารกับแขนกลโรบอท - กำหนดขนาดขั้นและความเร็วเริ่มต้น: ตั้งค่า step size การเคลื่อนที่เริ่มต้นและความเร็วในการเคลื่อนที่
- ฟังก์ชันเพิ่มและลดขนาดขั้น: มีฟังก์ชันที่ช่วยในการเพิ่มหรือลด step size การเคลื่อนที่ของแขนกล
- ฟังก์ชันเคลื่อนที่แขนกล: ฟังก์ชันเคลื่อนที่แขนกลไปยังทิศทางต่างๆ (ข้างหน้า, ข้างหลัง, ซ้าย, ขวา) และมีการปรับตำแหน่งจากข้อมูลปัจจุบันที่ได้รับจาก RTDE
- ลงทะเบียน Hotkeys: การใช้งานฟังก์ชันต่างๆ ผ่านการกดปุ่มลัดบนแป้นพิมพ์ เช่น ‘w’ สำหรับเคลื่อนที่ไปข้างหน้า, ‘+’ สำหรับเพิ่ม step size
- ลูปรอเหตุการณ์: โค้ดจะรันอยู่ในลูปที่รอการกดปุ่ม ‘esc’ เพื่อหยุดการทำงาน