![VirtualArm Sort & Store [Computer vision]](https://hcilab.net/wp-content/uploads/2024/03/image-8-602x300.png)
รับผิดชอบโดย => นายกวิน แย้มต่วน 66340700401
Objective
- สามารถจำแนก class ของวัตถุได้
- สามารถบอกพิกัดของวัตถุได้ (x,y)
Material and Method
ขั้นตอนการดำเนินงานแบ่งออกเป็น 6 ขั้นตอน
- การจัดเตรียมข้อมูลไว้สำหรับการฝึกฝน model ในที่นี้จะใช้เป็น Roboflow => Roboflow: Give your software the power to see objects in images and video
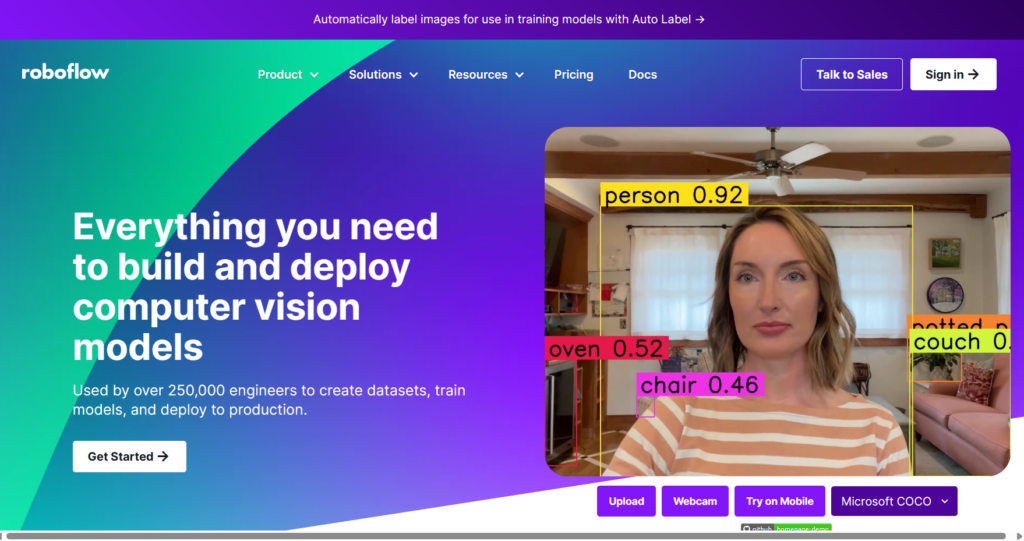
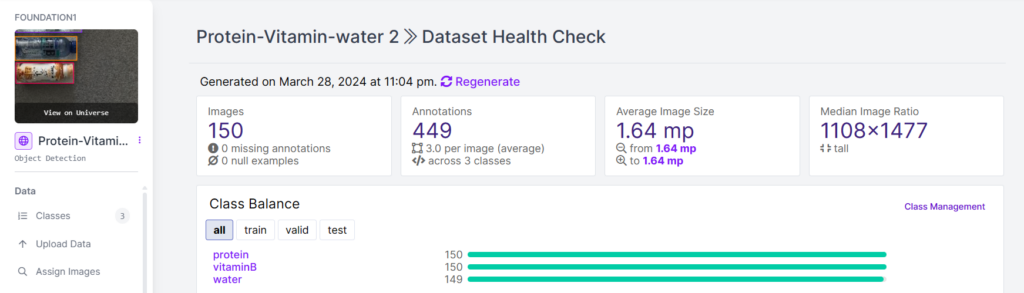
นี้จะเป็นในส่วนของภาพรวมของข้อมูลที่ได้มีการทำ label แล้ว
- ต่อมาคือการฝึกฝนโมเดลจะใช้เป็นในส่วนของ YOLOv8 => Home – Ultralytics YOLOv8 Docs/
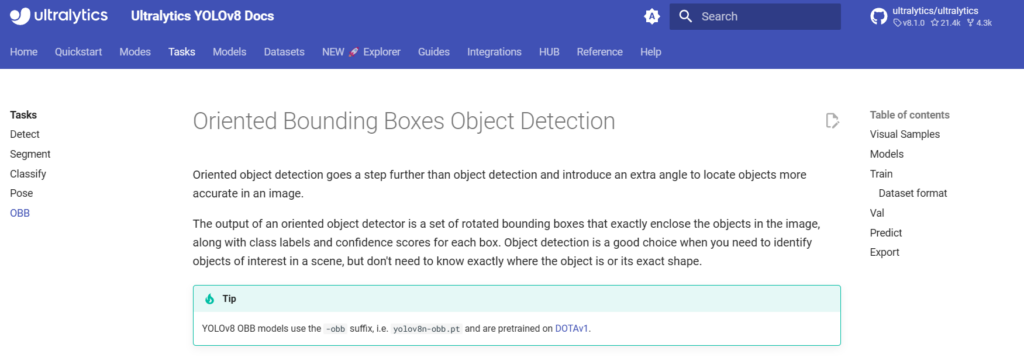
ซึ่งในส่วนของ model YOLOv8 ก็มีในส่วนของ model ที่สามารถหา Oriented Bounding Boxes ของวัตถุได้ เรียกว่า OBB (Oriented Bounding Boxes Object Detection)
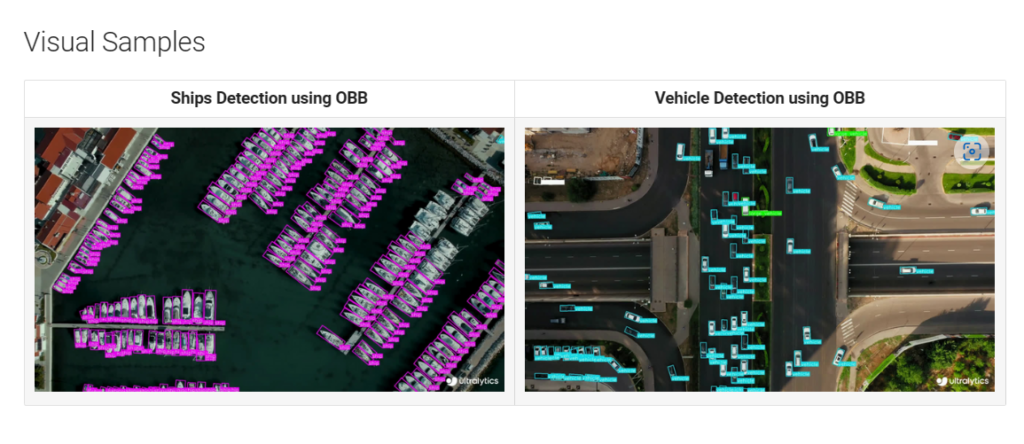
model นี้มันจะติดตามทิศทางการหมุนของวัตถุ ได้เช่นในภาพตัวอย่าง
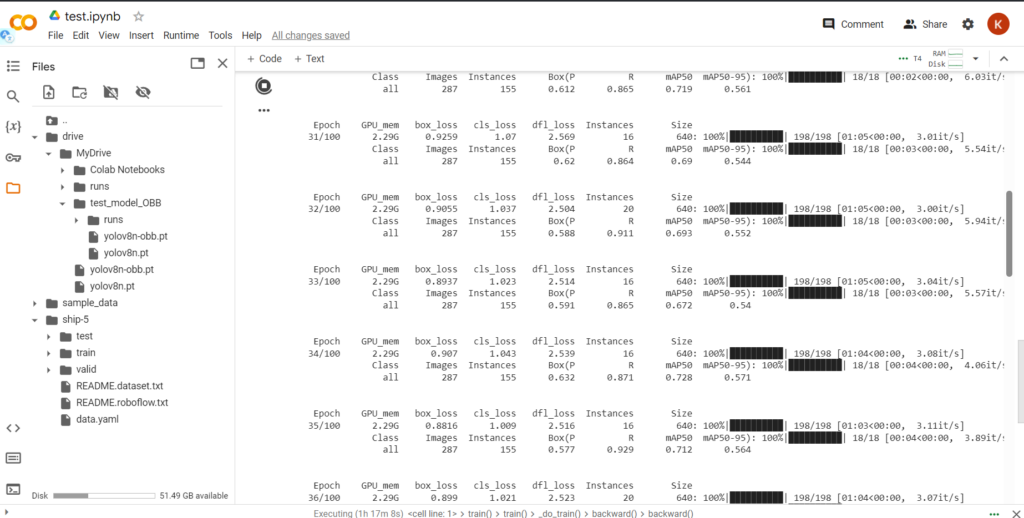
การฝึกฝน model จะใช้ในส่วนของ google colab train ทั้งหมด 100 epoch
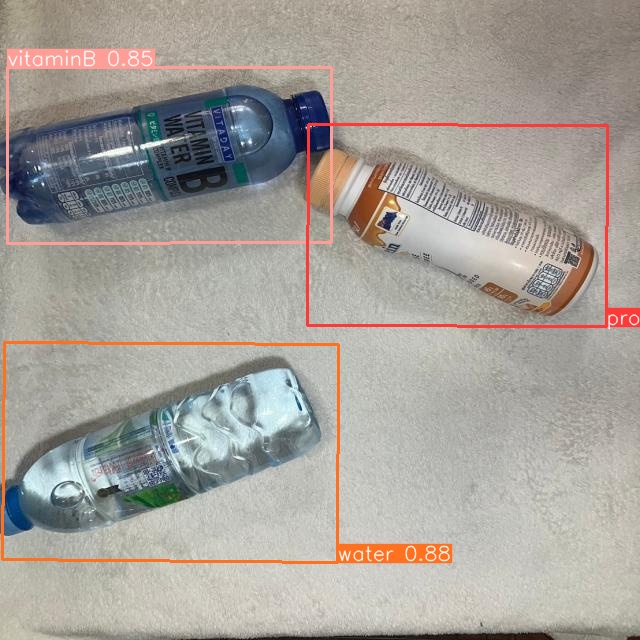
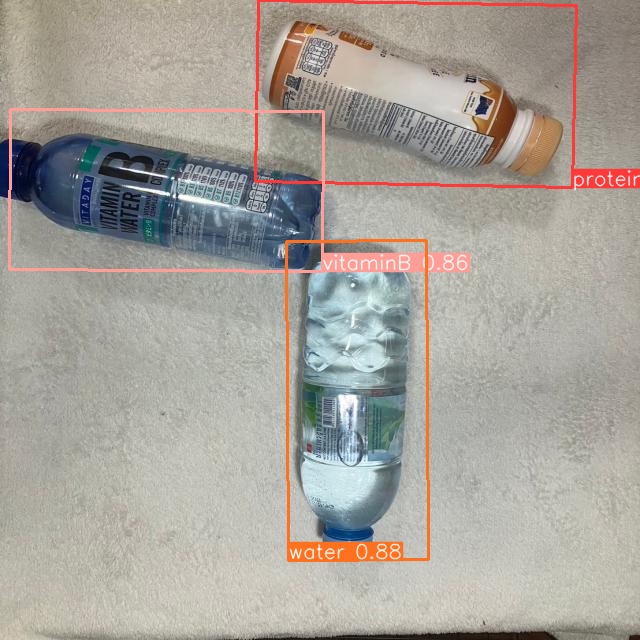
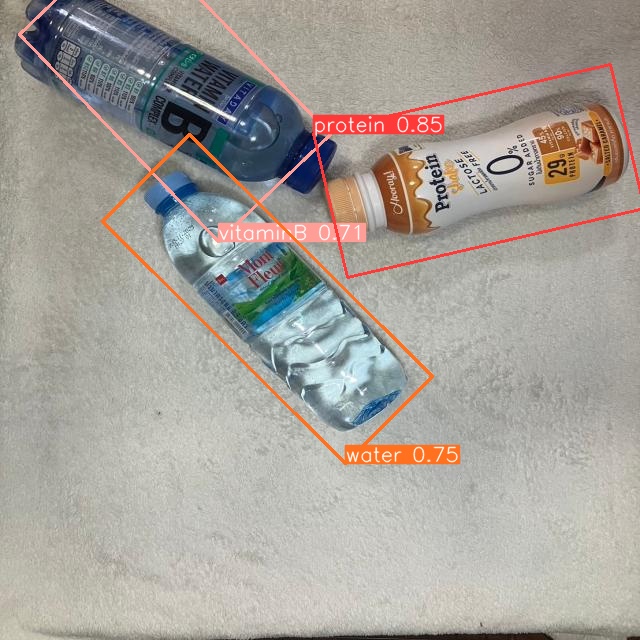
- ผลของการฝึกฝน model


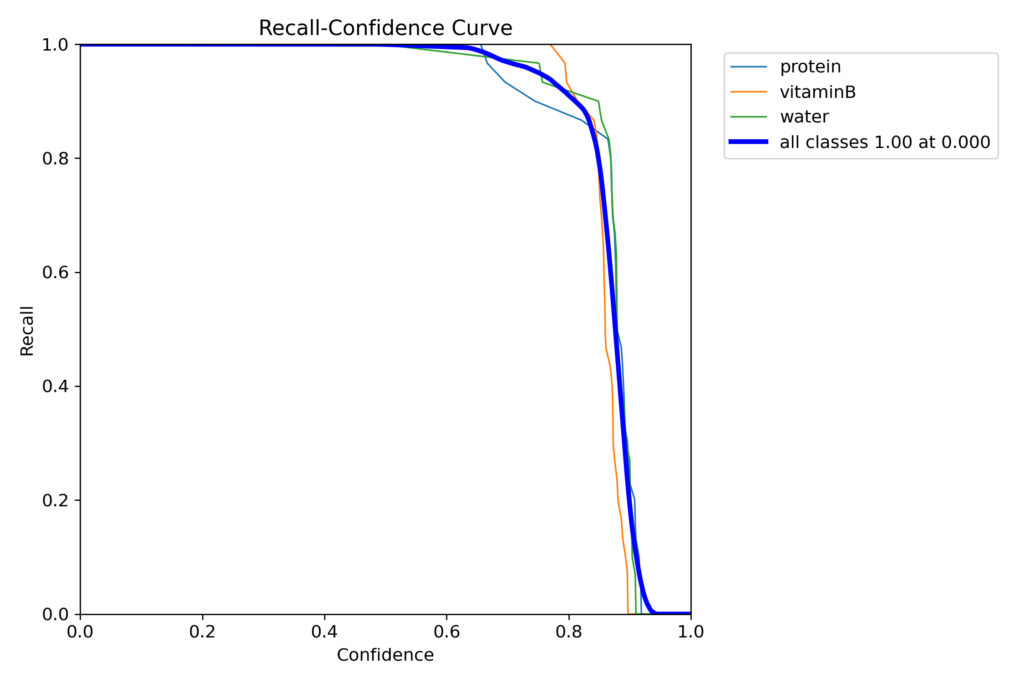
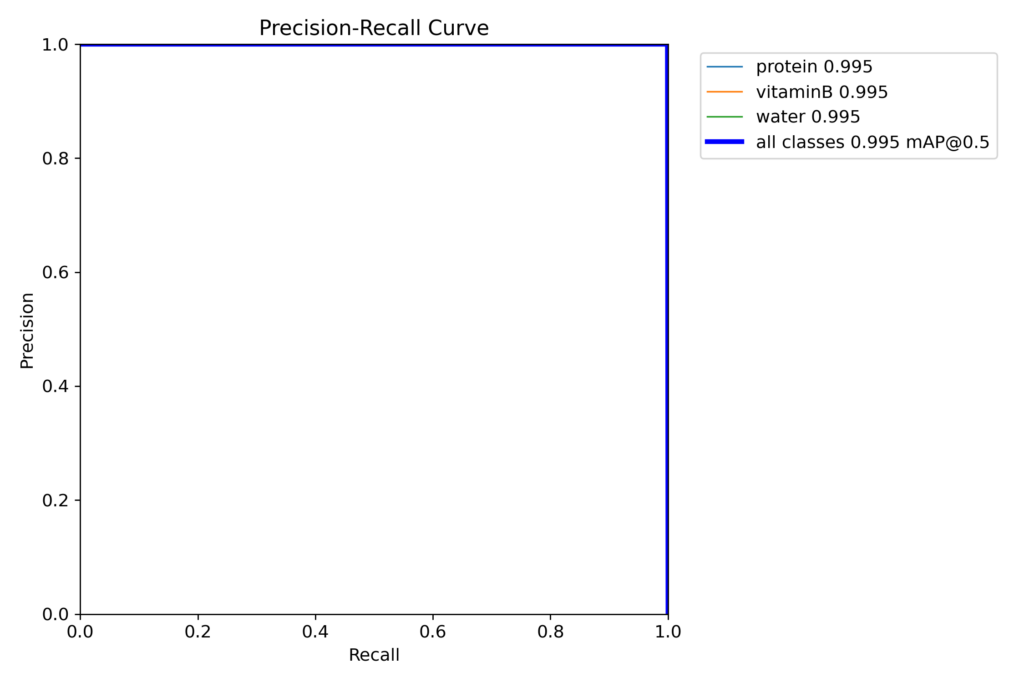

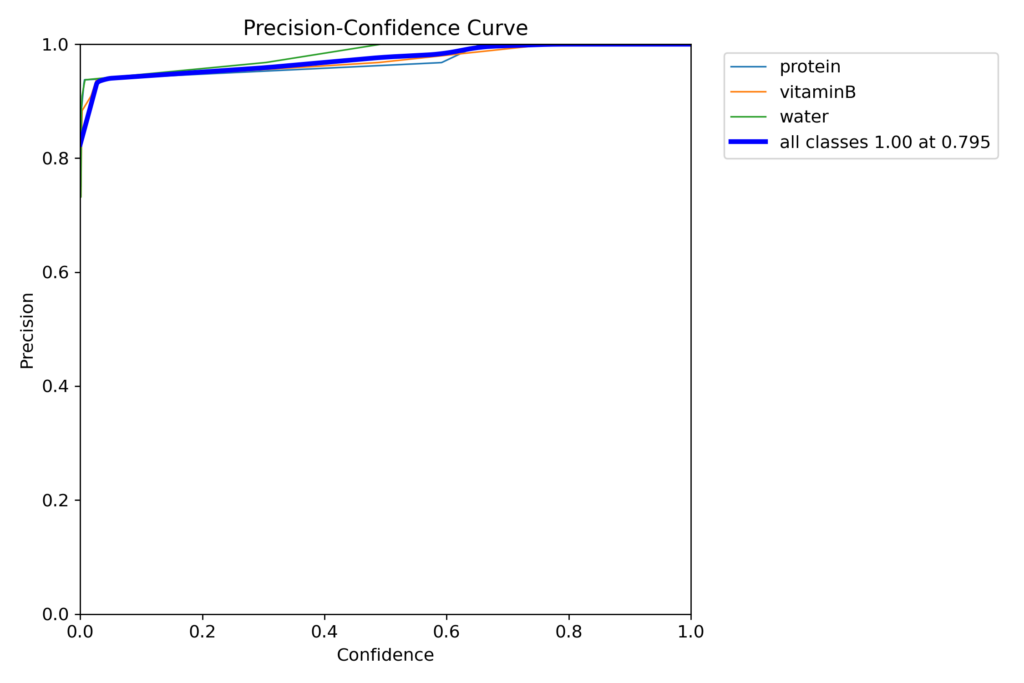
- ผลของการทดสอบการใช้งาน



Gantt Chart: Project Planner
