Class Project : Multi Player Mixed Reality Exploration with Hololens 2
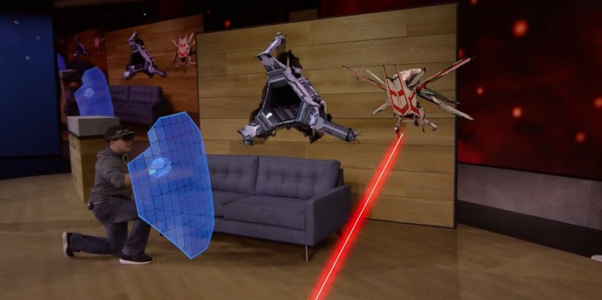
Microsoft Hololens 2 เป็นแว่นตาอัจฉริยะที่พัฒนาขึ้นโดยบริษัท Microsoft ที่สามารถนำวัตถุที่สร้างมาปรากฏซ้อมทับกับภาพความเป็นจริง หรือ mixed reality ทำให้ผู้สวมใส่สามารถที่จะจับต้องหรือมีประติสัมพันธ์กับวัตถุได้ โดยทาง Microsoft ได้ Hololens 2 ขึ้นเพื่อพัฒนาการเรียนรู้ในปัจจุบันให้มีประสิทธิภาพมากขึ้นการได้จำลองสถานการณ์ หรือ สภาพแวดล้อมจำลอง เพื่อให้ผู้ใช้สามารถเข้าถึงการเรียนรู้ในสถานที่จริง โดยไม่ต้องไปสถานที่จริง Mixed Reality หรือ MR คือ เทคโนโลยีความเป็นจริงแบบผสม โดยสามารถสร้างหรือนำเอาวัตถุมาปรากฏอยู่ในโลกความเป็นจริง นอกจากการมองเห็นแล้ว MR ยังครอบคลุมถึงการรับรู้อื่นๆ เช่น การได้ยิน การสัมผัส กลิ่น และรสชาติ …