
Deliverable this week
HoloLens Application ที่ส่งข้อมูลให้กับ Robodog ผ่าน MQTT Broker ได้สำเร็จ
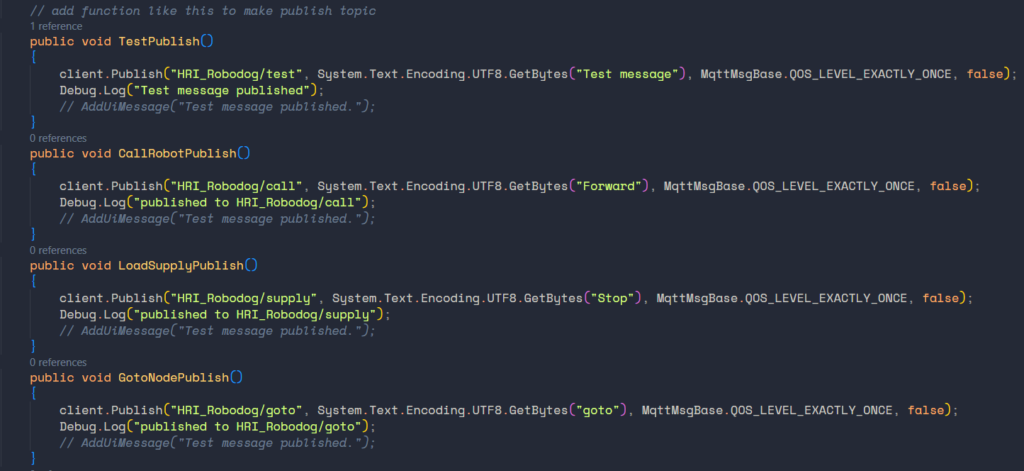
โดยที่ function ทั้งหมดที่ใช้ในการ publish topic จะมีทั้งหมด 4 topic คือ
- test (ใช้ในการทดสอบคำสั่งให้หุ่นยนต์สามารถหันหน้าเข้าหา user ได้)
- call (ใช้ในการเรียกหุ่นยนต์ให้เดินเข้ามาหา user โดยกำหนดให้เป็นคำสั่งการเดิน)
- supply (ใช้ในการสั่งให้หุ่นยนต์หมอบเพื่อรอ load supply โดยกำหนดให้เป็นคำสั่งการหยุด)
- goto (ใช้ในการกำหนดให้หุ่นยนต์เดินไปยังจุดหมาย)
Robodog (ROS2) สามารถรับคำสั่งจาก HoloLens Application ได้สำเร็จ
แต่ยังไม่สามารถ deploy ลง HoloLens 2 ได้เนื่องจากติด system update (ไม่สามารถเข้าดู IP ได้/ไม่สามารถเทส application ได้)
