ตัวหุ่นยนต์
ทำการเลเซอร์คัตแผ่นอะคิลิคเพื่อนำมาประกอบเป็นหุ่นตัวใหม่ เพื่อให้จัดเรียงพื้นที่ได้ง่ายยิ่งขึ้น
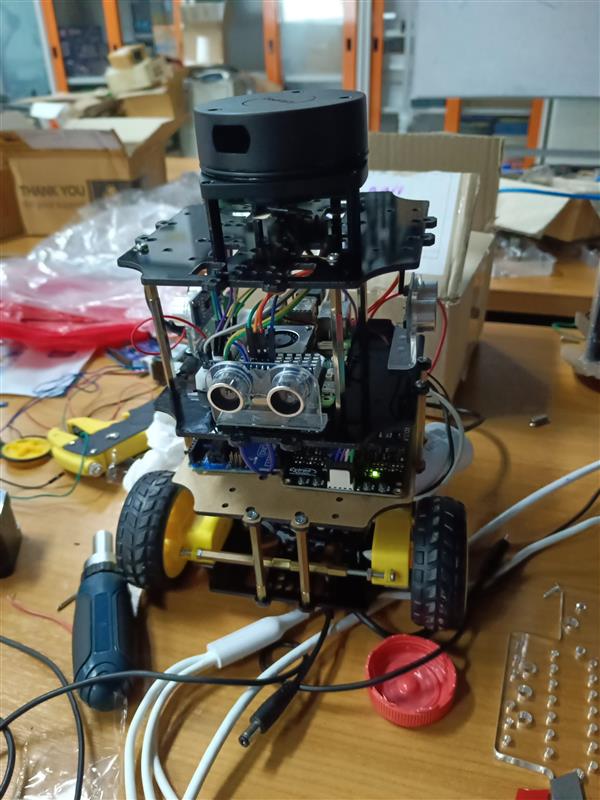
ใช้มอเตอร์DC 5V ในการขับเคลื่อนเนื่องจากมีน้ำหนักที่ค่อนข้างเบาและมีขนาดเล็ก
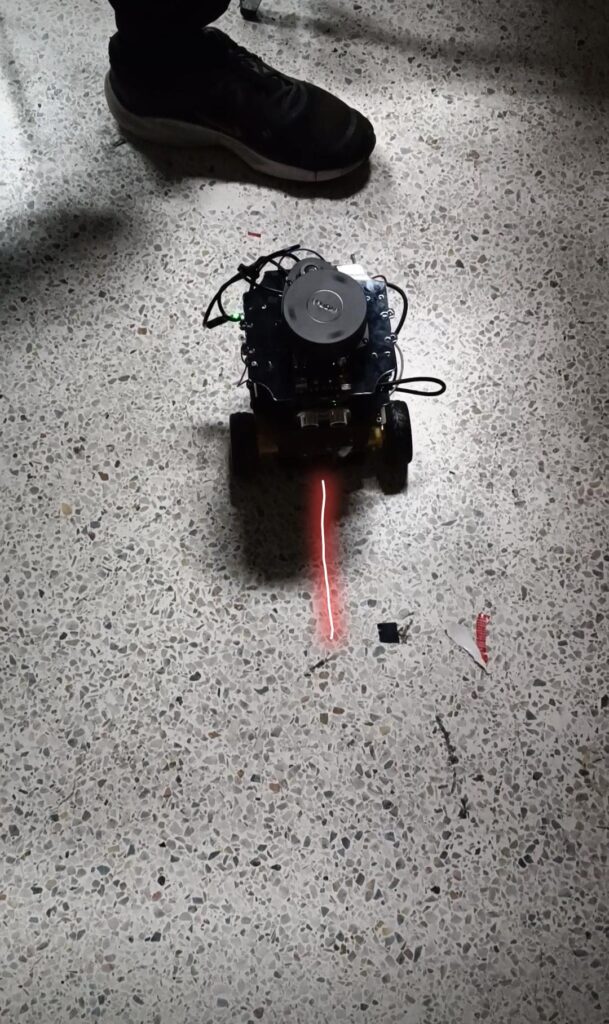
แต่ยังมีปัญหาคือในเมื่อเดินตรงตัวหุ่นจะเบี้ยวไปเรื่อยๆเนื่องจากมอเตอร์สองตัวมีกระแสไหลเข้าไปไม่เท่ากัน
โปรแกรม
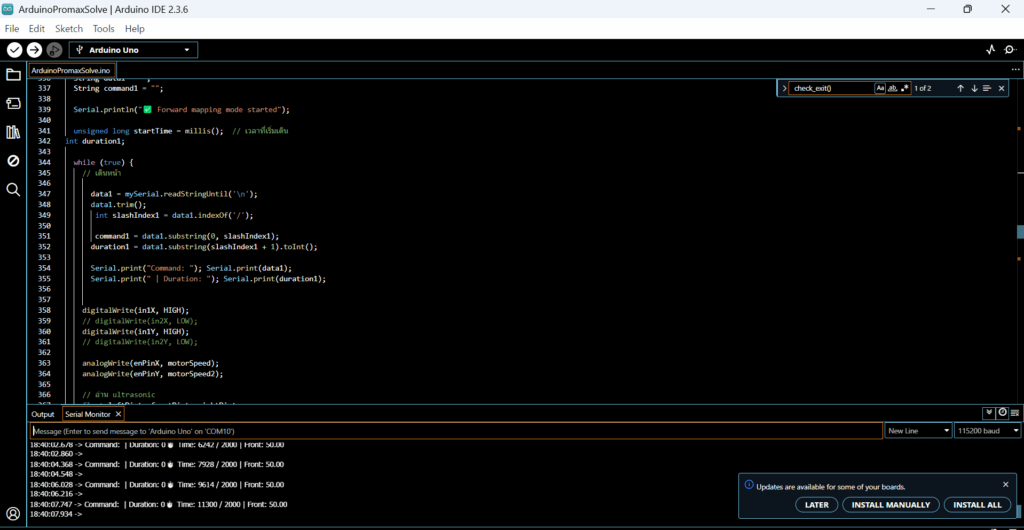
เนื่องจากปัญหาโค้ดarduino และpythonในraspberry pi5 ทำงานไม่ซิงค์กันจึงทำการย้ายโปรแกรมควบคุมหุ่นและเซนเซอร์ทั้งหมดมาไว้ที่arduino ส่วนrasberry pi จะทำหน้าที่รับ-ส่งmqttเท่านั้น
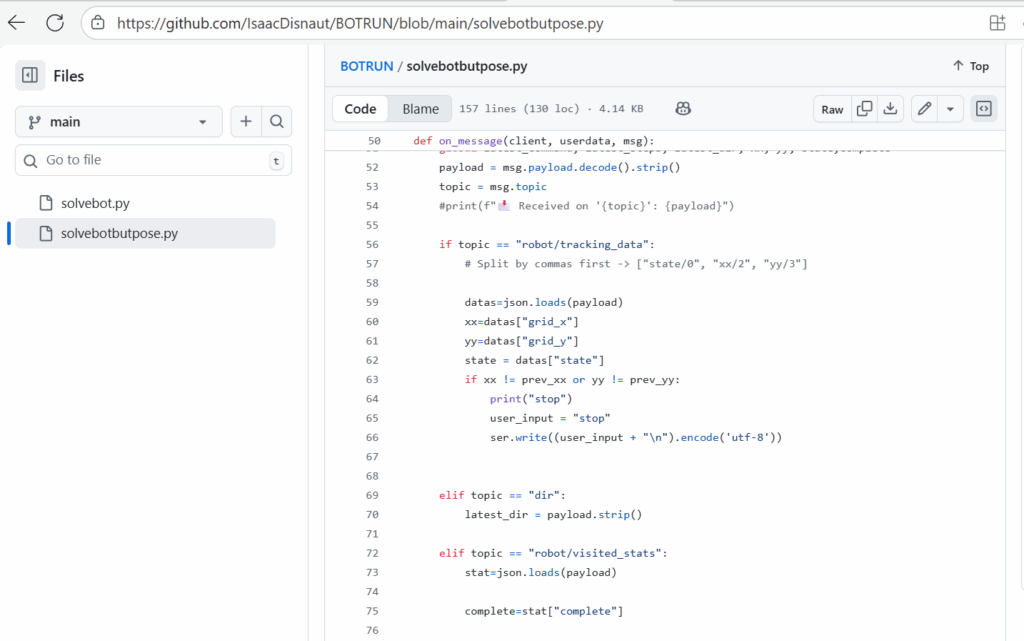
ส่วนpython ที่มีหน้าที่รับส่งmqtt ก็ได้เพิ่มให้สามารถรองรับค่าJson formatจากimage processingได้
สิ่งที่ได้ในสัปดาห์นี้คือ ได้ศึกษาวิธีการรับส่งค่าในformatของjson