FRA631 Foundation of Robotics Class project 68340700403 ตวัน ทองศุภโชค
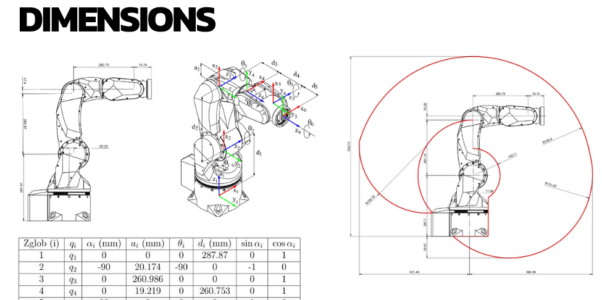
Kinematics แขนกลที่ใช้สำหรับคลาสโปรเจคนี้คือ โมเดลสำเร็จรูปของ Arctos robotics เนื่องจากมีการส่งกำลังหลายรูปแบบจึงเหมาะสมแก่การป็นสื่อการเรียนรู้ ขนาดของระยะแต่ละข้อต่ออ้างอิงจาก Datasheet และ URDF file ของหุ่นยนต์ arctos ตัวหุ่นจะสามารถเคลื่อนที่ได้ทั้งแบบ joint space และ task space สามารถกำหนดจุดให้เคลื่อนที่ไปตามจุดๆนั้นและการกำหนดให้เคลื่อนที่ในแกนใดแกนหนึ่ง(jog) และการกำหนดจุดในการเคลื่อนที่แบบ task space เมื่อมีการตรวจพบว่าเส้นทางตัดกับพื้นที่ของฐานจะมีการสร้างทางอ้อมดังรูป Joint space move Task space move เป็นการเคลื่อนที่โดยอิงจากตำแหน่งมุมของข้อต่อหรือมอเตอร์เป็นหลัก เช่นข้อต่อที่1 เคลื่อนจาก0ไปที่100 องศา ทำให้เราสามารถสั่งมอเตอร์และใช้ …