ROS คืออะไร
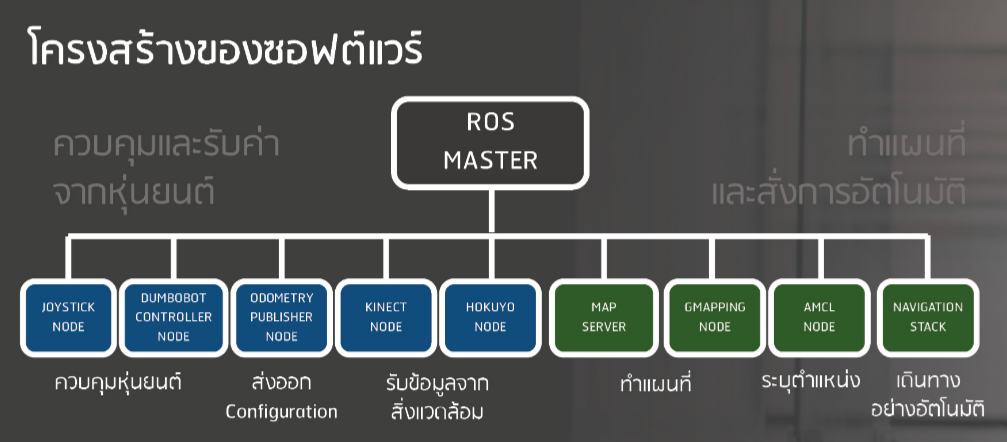
ROS หรือที่ย่อมาจาก Robot Operating System(ROS) เป็นระบบที่ออกแบบขึ้นมาเพื่อช่วยให้เกิดความยืดหยุ่นในการเขียนซอฟต์แวร์ควบคุมหุ่นยนต์ ซึ่ง ROS จะมีชุดคำสั่งต่าง ๆ ที่ใช้ในการควบคุมหุ่นยนต์มากมายรวบรวมเอาไว้ ซึ่งสิ่งต่าง ๆ เหล่านี้จะช่วยลดความยุ่งยากในการพัฒนาหุ่นยนต์ที่มีความซับซ้อน และเพิ่มประสิทธิภาพในการพัฒนาหุ่นยนต์
Unity โปรแกรมจำลองโมเดล 3 มิติ
Unity เป็นโปรแกรมที่สามารถใช้งานได้ฟรีและมีแหล่งข้อมูลมากมาย ซึ่งตัวโปรแกรม Unity นั้นสามารถทำการจำลองตัวโมเดล 3 มิติของหุ่นยนต์ พร้อมกับสภาพแวดล้อมเสมือนต่าง ๆ อีกทั้งยังมีอุปกรณ์มากมายที่สามารถเขียนใช้งานกับ Unity

ROS + Unity !!
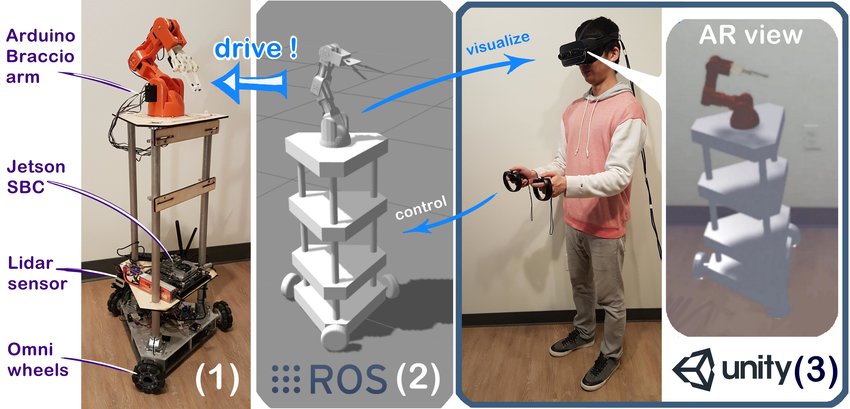
Unity นั้นสามารถที่จะนำไปใช้ทำ VR หรือ AR ได้ ซึ่งหากเรานำ ROS ที่ใช้ในควบคุมหุ่นยนต์มาใช้งานร่วมกันกับ Unity ก็จะทำให้เราสามารถจำลองหุ่นยนต์ที่ถูกควบคุมผ่าน VR หรือ AR ได้! หรือจะควบคุมตัวหุ่นยนต์โดยใช้อุปกรณ์อย่าง Oculus Quest, Hololen และอื่น ๆ ได้อีกด้วย
Discussion
การนำไปประยุกต์ใช้
- สามารถใช้ Unity เป็น Physical-based Simulation ในการช่วยควบคุมหุ่นยนต์ผ่าน ROS ได้
- สามารถควบคุมและจำลองหุ่นยนต์ในรูปแบบ VR และ AR โดยการทำผ่าน Unity ได้
- สามารถใช้อุปกรณ์ต่าง ๆ ที่สามารถเขียนใช้ผ่าน Unity ไปควบคุมหุ่นยนต์ได้ (เช่น Oculus Quest, HTC Vive, Hololen)
คลิป Tutorial สำหรับติดตั้ง Unity และใช้งานกับ ROS2 ใน Ubuntu
ผู้จัดทำ

นาย สรสิทธิ์ ตติไตรสกุล 63340500065
ลิ้งอ้างอิง