การสื่อสารระหว่าง lidar-bot(ESP32) กับ MPU6050(IMU)
การสื่อสารระหว่าง IMU และ ESP32 ใช้โปรโตคอล I2C โปรโตคอลนี้ใช้สองสายสำหรับการสื่อสาร, SCL (clock) และ SDA (data)

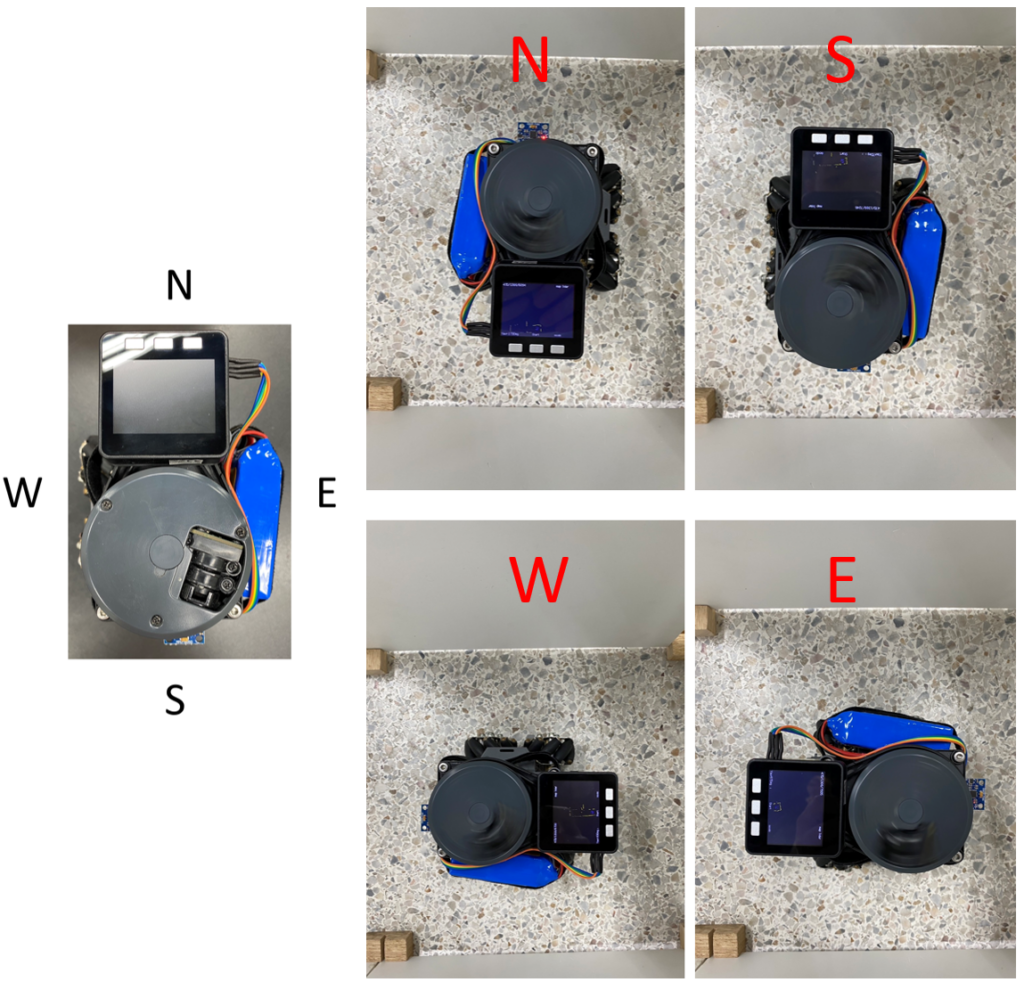
การกำหนดทิศทางและผลลัพธ์ที่ได้จากการอ่านค่า IMU
ค่าที่ได้จาก IMU ทางทิศ North มีค่าโดยประมาณ -176 Deg ทางทิศ South มีค่าโดยประมาณ 0 Deg ทางทิศ West มีค่าโดยประมาณ -85 Deg ทางทิศ East มีค่าโดยประมาณ -265 Deg
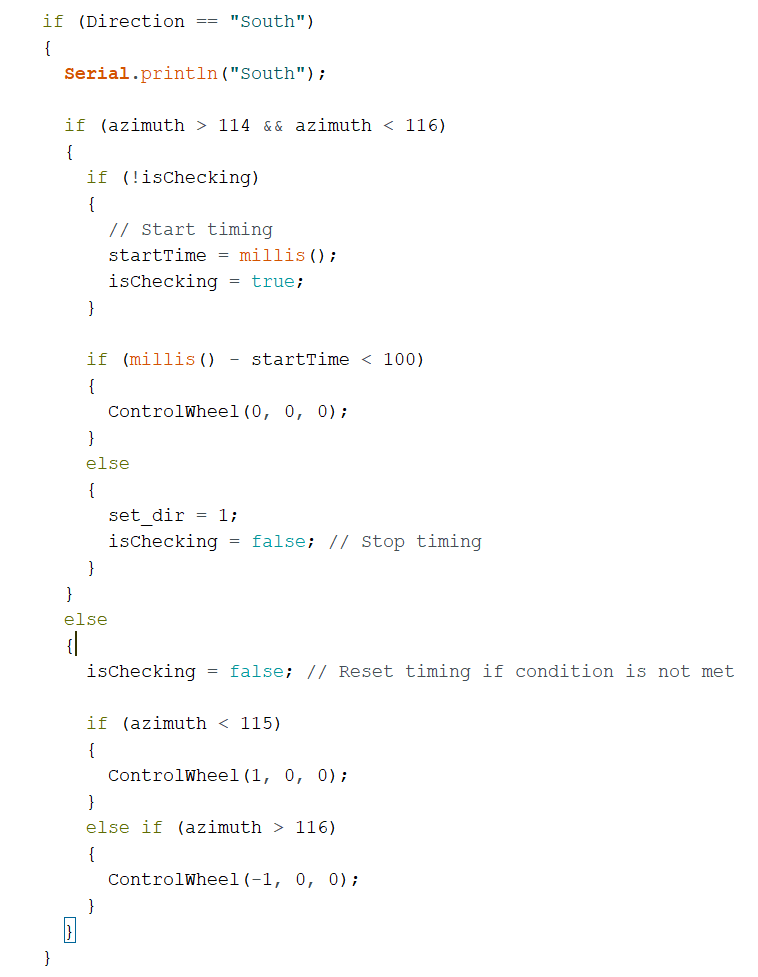
การนำค่าทิศทางของ IMU ใช้ควบคุมหุ่นยนต์
เริ่มจากกำหนดขอบเขตว่าค่าอะไรคือทิศอะไร
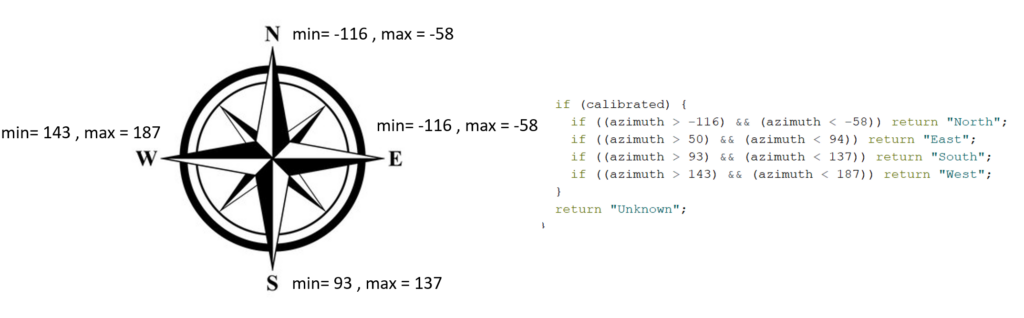
สร้างเงื่อนไขเพื่อให้หุ่นยนต์เคลื่อนที่ตามค่าทิศทางที่กำหนด เช่น หุ่นยนต์อยู่ทางทิศ South ค่าที่อ่านได้จะอยู่ในช่วง 93 ถึง 137 หาค่าระหว่าง 93 ถึง 137 คือ 115 เราจะใช้ค่านี้เป็น Setpoint กำหนดการเคลื่อนที่จากโค้ด ทำแบบเดียวกันทั้งหมด 4 ทิศ