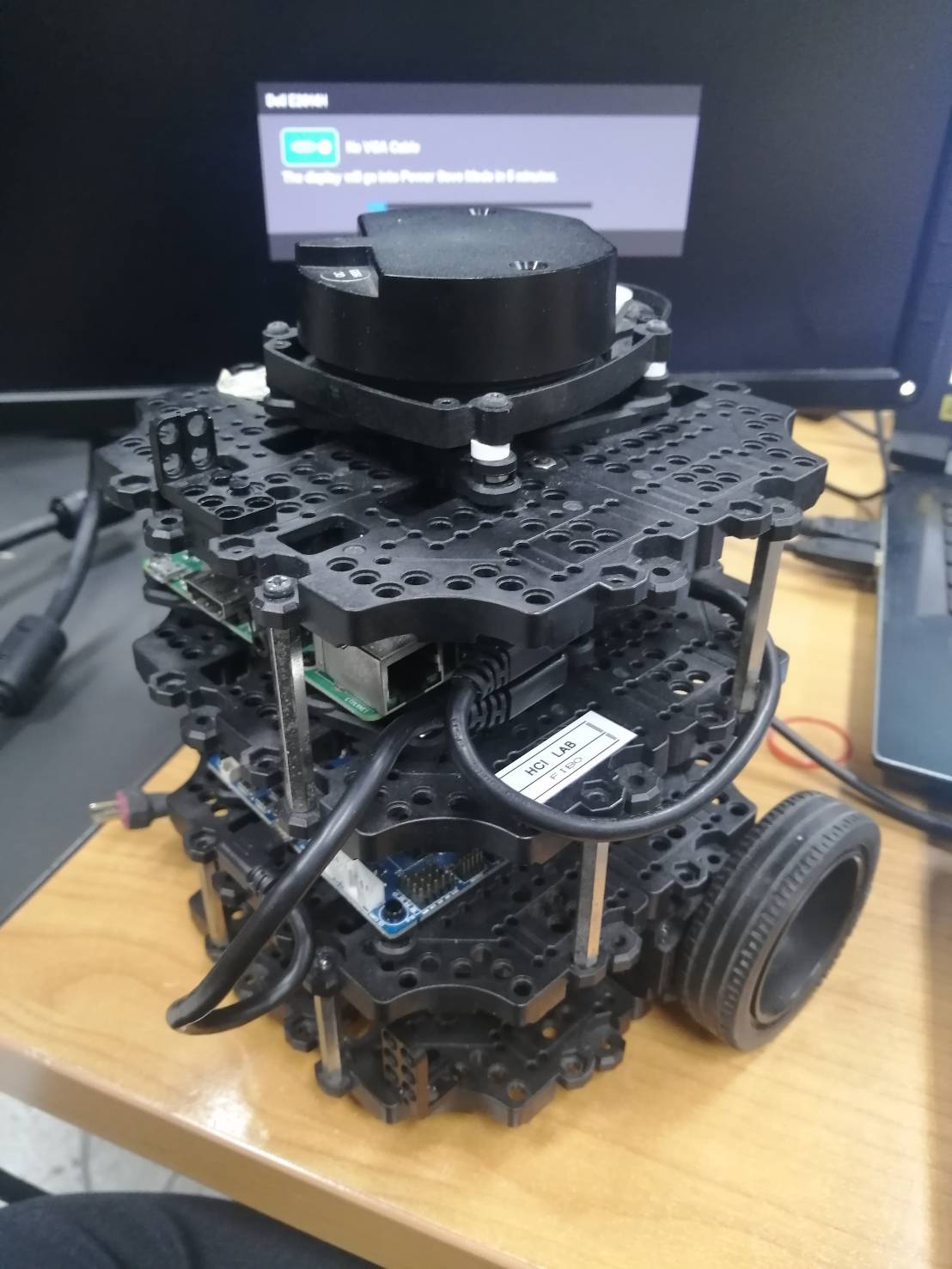

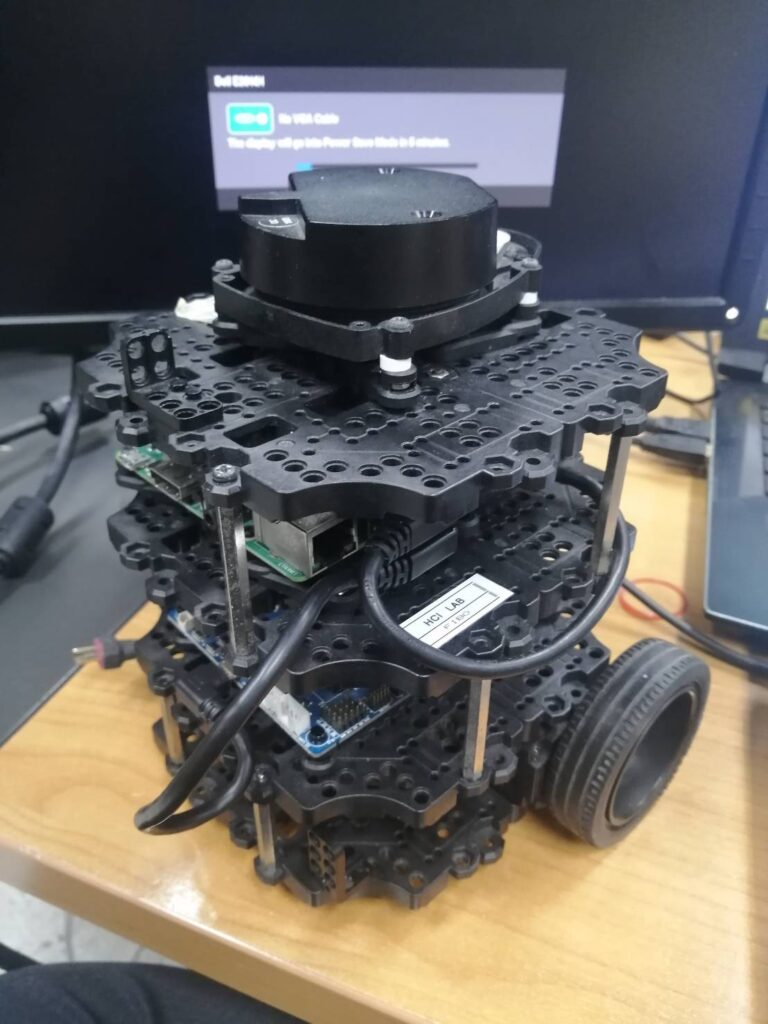
Step 1: Assembly hardware part





Step 2: Setting up the robot and the local computer to remotely into the robot
Click this Link and follow the step
- Check the version of Ubuntu to choose the version of ROS. (My Ubuntu version is 18.04, so I chose ROS Melodic)
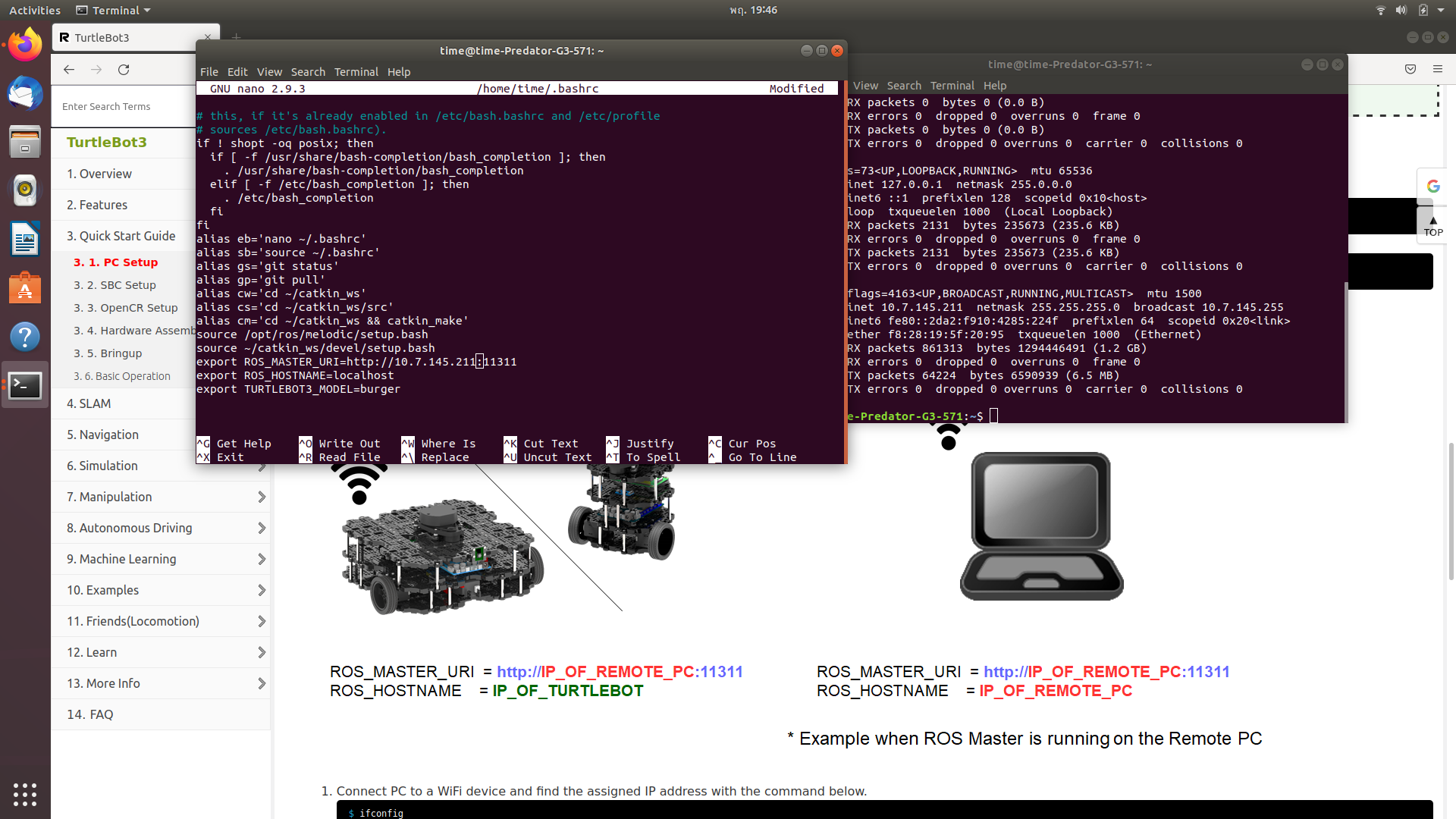
- Setup ROS network configuration by edit IP-address in ~/.bashrc file in both of the robot and local computer
- Choose and install Lidar driver between LDS-01 (Old) and LDS-02 (New)

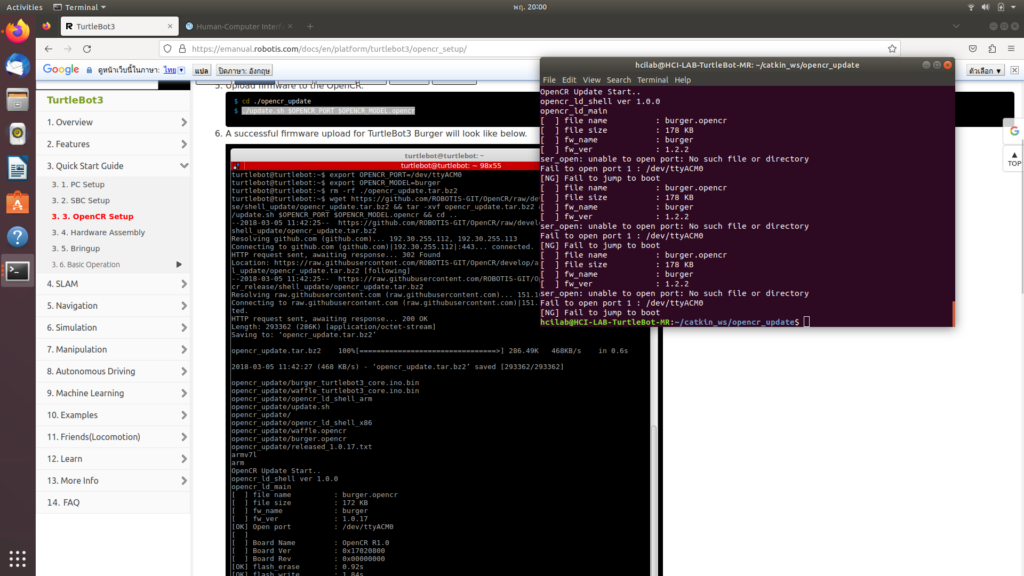
- Setup OpenCR (Sometime it can’t jump to boot)
- Run roscore and Bringup (Problem: Can’t connect to WIFI in the university so, I can’t ssh into the robot)
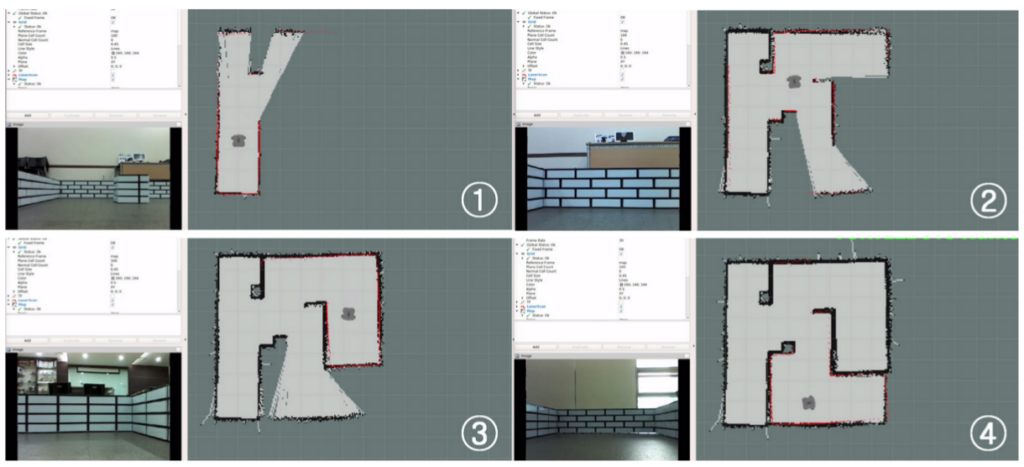
- SLAM (Scan map) and Save map
EXAMPLE RESULT:
- Using Gazebo to simulation the robot in simulation workspace

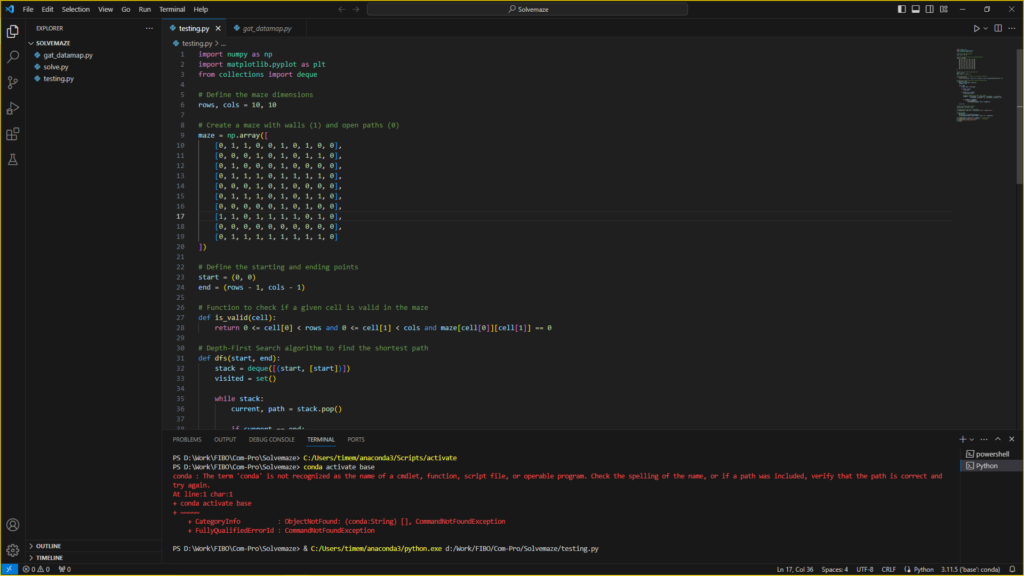
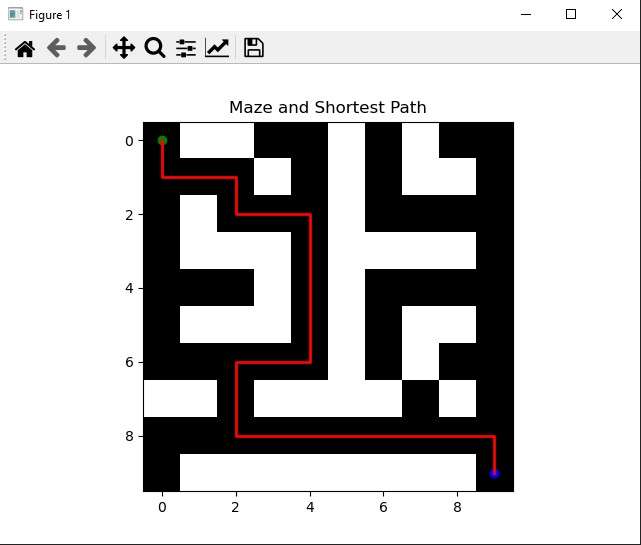
Step 3: Create maze map
Using Python to create maze map and calculate to find the shortest path