
Project : Solved Maze
Objective
1. เรียนรู้วิธีวิเคราะห์ปัญหาอย่างเป็นระบบเพื่อให้อัลกอริทึมได้รับมาเพื่อแก้ปัญหา
2.เรียนรู้เกี่ยวกับการใช้อัลกอริธึมดังกล่าวเพื่อแก้ปัญหาจริง
3.เรียนรู้เกี่ยวกับแอปพลิเคชันของอัลกอริทึมดังกล่าวเพื่อเริ่มต้นกับโลกของอัลกอริทึมหุ่นยนต์ ปัญญาประดิษฐ์ และอื่นๆ
ขอบเขตของงาน
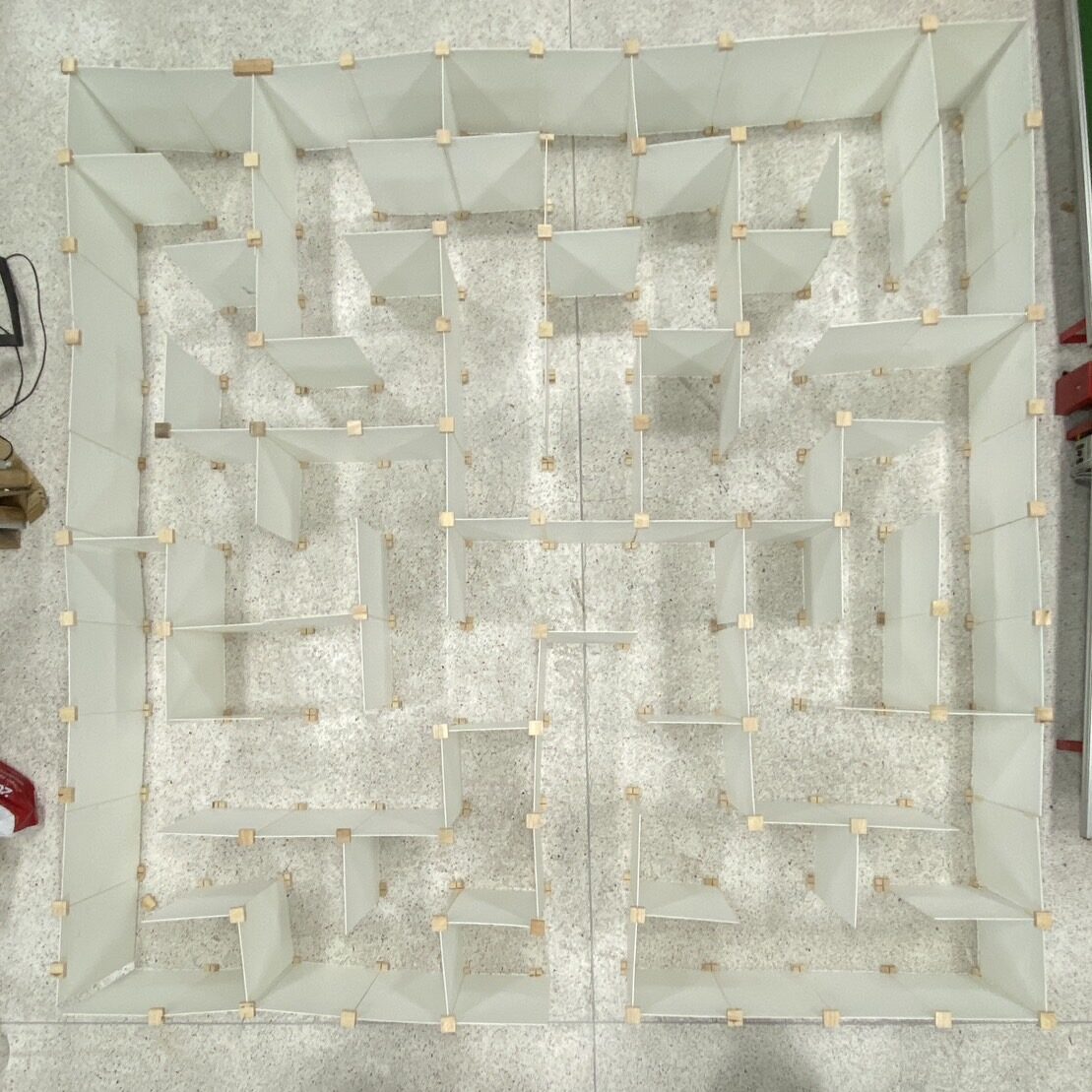
- เขาวงกตที่มีขนาด 3000×3000 mm. หรือ 10×10 block. โดยหุ่นยนต์ Lidarbot จะวิ่งในเขาวงกตทั้งหมด 2 รอบ
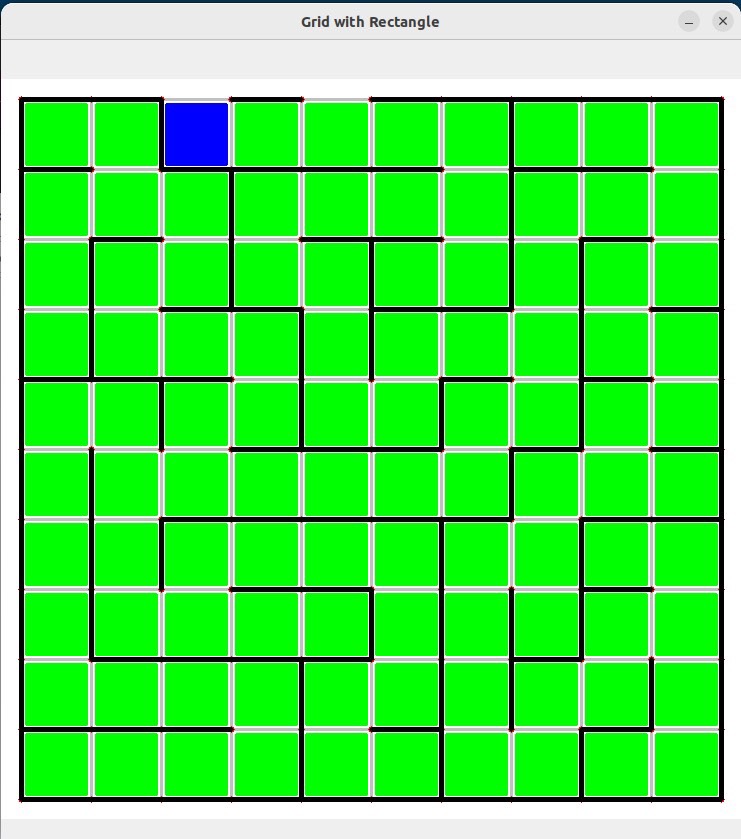
- LidarBot สำรวจเส้นทางเข้าวงกตโดยเดินทางสำรวจแผนที่ทั้งหมดในรอบแรก
- LidarBot สามารถคำนวณเพื่อหาทางออกที่สั้นที่สุดในการวิ่งรอบที่ 2 และแสดงวิธีการเดินทางออกมาของหุ่นยนต์
- LidarBot สามารถเคลื่อนที่ในสนามที่สมมาตรและไม่สมมาตรได้
Algorithm ที่ใช้
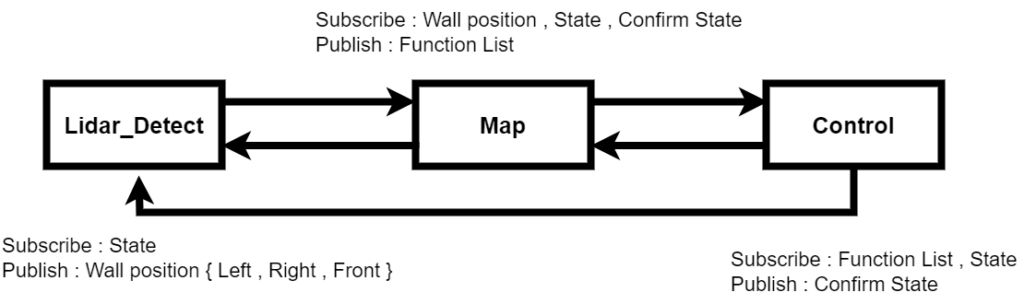
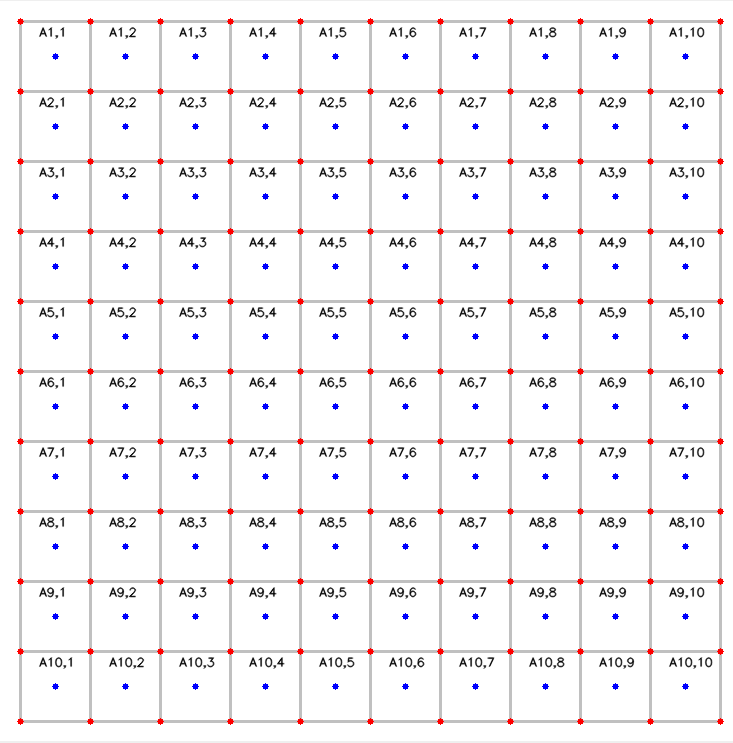
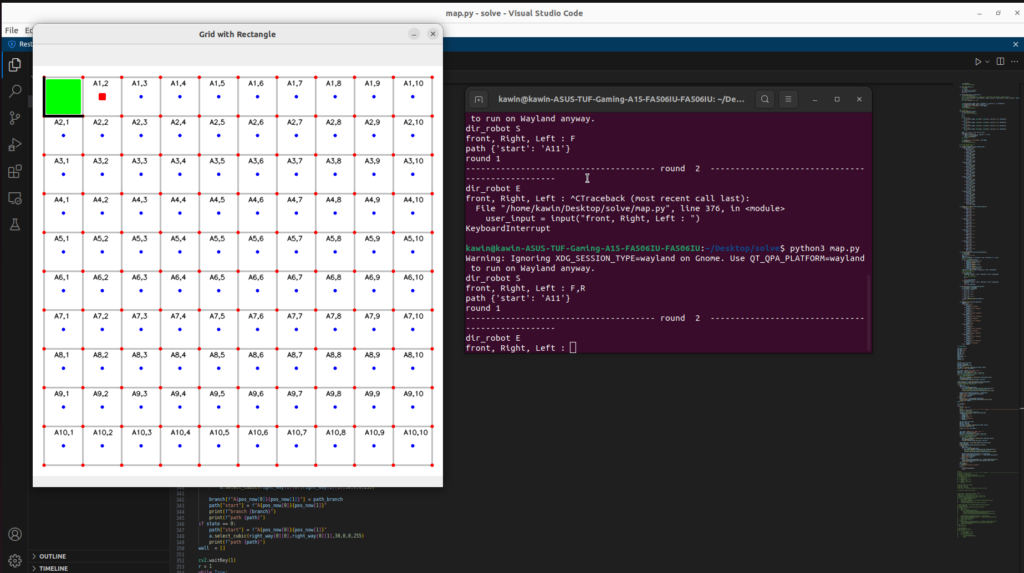
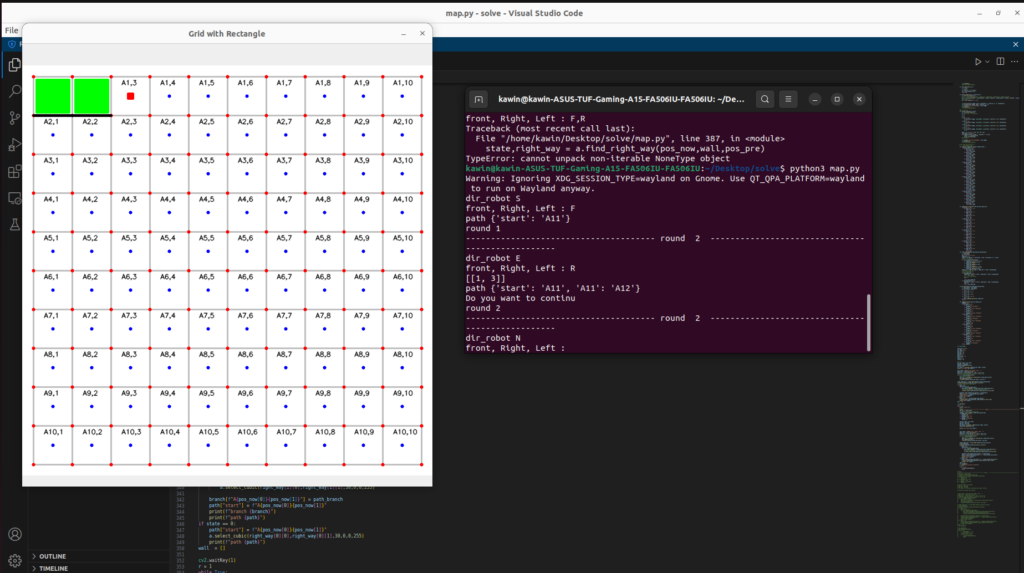
1.การรับรู้ของโปรแกรม : เริ่มจากการทำแผนที่สำหรับการสร้างเป็นตำแหน่งอ้างอิงให้กับ algorithm เพื่อให้ตัว algorithm สามารถเข้าใจได้ว่าตัวเองกำลังทำอะไรอยู่ มันจะต้องเข้าใจถึงตำแหน่งที่อยู่ จุดที่อยู่ เส้นที่อยู่ และ box ที่อยู่ ซึ่งกำหนดเป็น Ai,j ตามรูปด้านล่าง
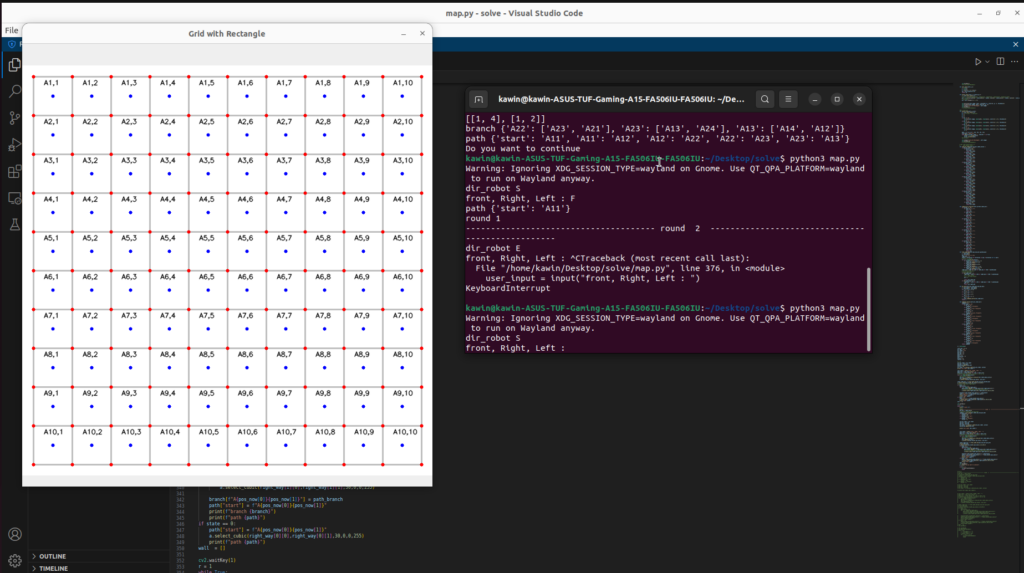
ผลลัพธ์การเดินทางครั้งแรก
2. BFS หรือ Breadth-First Search (การค้นหาแบบกว้าง)
ขั้นตอนการทำงานของ BFS ได้แก่:
1. เริ่มต้นที่โหนดเริ่มต้น (start node) และทำเครื่องหมายว่าโหนดนั้นถูกเยือนแล้ว.
2. ท่องไปยังโหนดลูกทุกตัวของโหนดปัจจุบัน (ถ้ามี) และทำเครื่องหมายว่าลูกของโหนดนั้นถูกเยือน.
3. ทำซ้ำขั้นตอน 2 สำหรับทุกๆ โหนดลูกที่ยังไม่ได้เยือน.
4. ทำซ้ำขั้นตอน 3 สำหรับโหนดลูกของโหนดล่าสุดที่ยังไม่ได้เยือน.
5. ทำซ้ำขั้นตอน 4 จนกว่าทุกโหนดที่เป็นไปได้จะถูกเยือน.
BFS มักถูกใช้ในการหาทางที่สั้นที่สุด, ค้นหาคำตอบในปัญหา Maze (ปัญหาทางใน Labrynth), หรือในการค้นหาโครงสร้างข้อมูลแบบกราฟ เพื่อตรวจสอบความสัมพันธ์ระหว่างโหนดและระยะทางที่ใกล้ที่สุด.
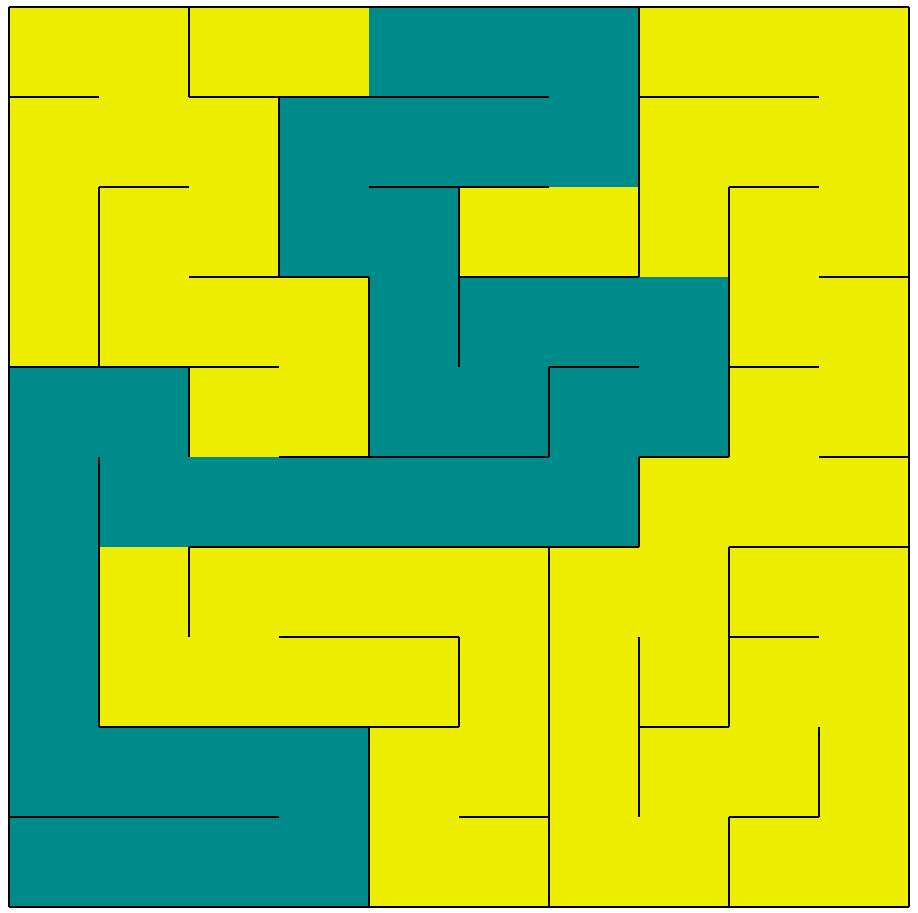
จากคลิปหลังจากได้รับค่า csv file มาแล้วนำค่าไปคำนวนหาเส้นทางที่สั้นที่สุด โดยกำหนดจุด Start = (1,5) และ จุด Goal = (10,1)
Content
Team Members

1. 66340700401 นายกวิน แย้มด่วน
2. 66340700402 นายกอบโชค ปภานิธิสกุล

3. 66340700404 นายเมธีรัฐ เสนคำสอน

4. 66340700405 นายวชิรเมษฐ์ กุลธนาเรืองนนท์

5. 66340700406 นายวิธวินท์ ปิ่นประเสริฐ