บันทึกการปฎิบัติงานประจำวัน โครงการ 2B-KMUTT รุ่นที่ 18 โดย อรชพร คงเจริญ
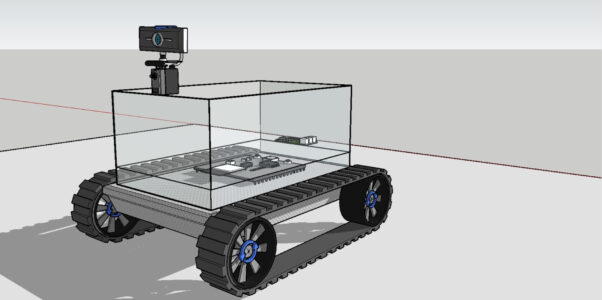
25/3/2024 เป็นวันแรกที่ได้เข้าแลปกลุ่มวิจัยหุ่นยนต์และระบบอัตโนมัติ ทำการหาข้อมูลเพื่อมาเสนอแนวคิดในการสร้างproject ซึ่งตัวprojectนั้นควรมีความสร้างสรรค์และเป็นประโยชน์แก่สังคม 26/3/2024 เมื่อได้ไอเดียถึงprojectที่จะทำเเล้วก็วางแผนออกแบบโครงสร้างของหุ่นยนต์ให้มีfunctionที่เหมาะสม เเละลิสต์อุปกรณ์ที่ต้องใช้ในการทำงานเพื่อวางแผนการซื้ออุปกรณ์ โดยprojectของเราเป็นหุ่นยนต์ส่งยาในโรงพยาบาล มี2prototypes prototype แรกจะเป็นกระบวนการของการเคลื่อนที่และส่งภาพของหุ่นยนต์โดยหุ่นยนต์จะเคลื่อนที่ตามคำสั่งของHTC Vive tracker ส่งภาพจากwebcamไปที่raspberry pi ให้ oculus quest และprototype ที่สองจะเป็นกระบวนการของการส่งยาจากเภสัชให้กับผู้ป่วยผ่านตัวหุ่นยนต์ แผนผังกระบวนการทำงานของproject เราเป็นดังภาพนี้ โครงสร้างของprojectเป็นดังภาพ 27/3/2024 ทำการออกแบบ 3D printในส่วนของชิ้นส่วนที่ใช้ในการบรรจุยา (prototype สอง) และช่วยในการต่อวงจร 28/3/2024 สั่งซื้ออุปกรณ์ที่ใช้ในการทำงาน ช่วยในกระบวนการต่อวงจร ทำการศึกษาเรื่อง web …