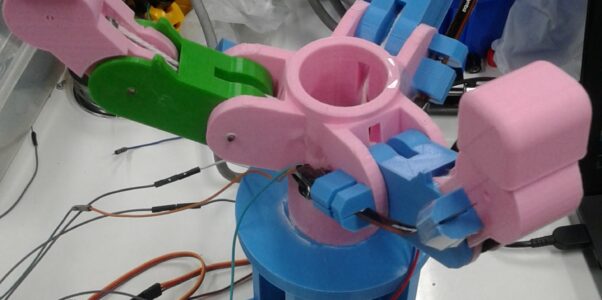
การพัฒนาแขนกลเพื่อตรวจจับวัตถุโดยวัดจากค่าความโค้งงอของ Flex Sensor (Robot Gripper for Detecting Object Using Flex Sensor)
ในปัจจุบันโลกของเรามีการนำเอา Machine learning หรือการทำให้เครื่องจักรสามารถเรียนรู้สิ่งต่าง ๆ ได้ด้วยตัวเองจากข้อมูลที่มีอยู่ มาใช้กับเทคโนโลยีในชีวิตประจำวันมากขึ้น เพื่อให้เทคโนโลยีตอบสนองกับความต้องการที่หลากหลายของมนุษย์ในปัจจุบันได้ ดังนั้นกลุ่มวิจัยของเราจึงได้ทำการวิจัยในเรื่องของ 3D Printed Robot Gripper เพื่อให้แขนกลนั้นสามารถรับรู้ได้ว่าวัตถุที่แขนกลหยิบจับนั้นคืออะไร โดยการอุปมาจากรูปร่างของวัตถุและเชื่อมโยงกับฐานข้อมูลที่มีอยู่เพื่อแสดงผลว่าวัตถุชิ้นนั้นคืออะไร ในขั้นตอนการทำวิจัยส่วนของแขนกลจะได้มาจากการออกแบบและสร้างโดยใช้การพิมพ์ แบบสามมิติ ซึ่งจะใช้ Servo Motor ในการควบคุมแขนกลผ่าน Micro Controller และบังคับการหมุนของมอเตอร์โดยใช้ตัวท้านทานปรับค่าได้ (Potentiometer) ในส่วนของการเก็บข้อมูลจะเก็บข้อมูลของความโค้งงอของแต่ละนิ้วโดยใช้ Flex Sensor โดยเราจะเก็บค่าความโค้งของแต่ละวัตถุและหาค่าเฉลี่ยของค่าความโค้งของแต่ละวัตถุที่แขนกลหยิบจับ นำมาเก็บไว้เป็นฐานข้อมูล เมื่อแขนกลหยิบจับวัตถุครั้งต่อไปแขนกลก็จะเปรียบเทียบค่าความโค้งของวัตถุที่กำลังหยิบจับกับค่าที่มีอยู่แล้วในฐานข้อมูล ถ้าค่านั้นใกล้เคียงกันแขนกลก็จะรู้ได้ว่าวัตถุนั้นคืออะไรและจะแสดงผลทางจอภาพ ซึ่งงานวิจัยนี้เป็นการศึกษาถึงพื้นฐานของ Machine learning …