ในการออกแบบและพัฒนา User Interface ของ META MOBOT ได้ออกแบบโดยมุ่งเน้นให้เกิดการมีปฏิสัมพันธ์ระหว่างคอมพิวเตอร์กับผู้ใช้งานหลายคนพร้อมกัน (Multi-User) โดยจัดทำหน้า User Interface ในการรับค่า (Input) ผ่าน Oculus Quest 2, เมาส์, และคีย์บอร์ด นอกจากนี้ยังมี User Interface สำหรับการรับค่าจาก META MOBOT เพื่อแสดงข้อมูล (Output) ให้แก่ผู้ใช้งาน ซึ่งประกอบไป
ด้วยรายละเอียด ดังนี้
1. Theme
2. Player Model
3. การแสดงผลข้อมูล
4. การควบคุม
1. Theme
1.1 Overall
การออกแบบจะใช้ Theme Sci-Fi และ Space เป็นหลัก โดยจะเน้นความหรูหราและความทันสมัย เพื่อให้ผู้ใช้งานได้สัมผัสถึงเทคโนโลยีแห่งโลกอนาคต
1.2 Color
จะใช้สีที่สื่อถึงคณะวิทยาการหุ่นยนต์ภาคสนาม โดยใช้สีขาวและสีส้ม เป็นหลัก
- สีขาว HEX : #FFFFFF
- สีส้ม HEX : #FF931F
- สีกรมเข้ม HEX : #06151E
- สีดำ HEX : #000000
1.3 Font
– Quark Light / Bold
https://typomancer.com/quark
2. Player Model
คือ Avatar แทนตัวผู้ใช้งานในโลก VR กล่าวคือ เมื่อผู้ใช้งานเข้ามาในโลก VR ผู้ใช้งานจะกลายเป็นModel ตามที่ผู้พัฒนาได้ออกแบบไว้นอกจากนี้การเคลื่อนไหวต่างๆที่เกิดจากตัวผู้ใช้งาน Model ในโลก VR ก็จะเคลื่อนไหวเหมือนกันกับผู้เล่นในโลกจริงทั้งตำแหน่ง (Position) และทิศทาง (Rotation)
2.1 Player Head
เป็น Model ส่วนศีรษะของผู้เล่น โดยออกแบบตาม Model ของหุ่นยนต์ที่รู้จักกันในชื่อ FOBI ซึ่งเป็นผลงานของนักศึกษา FIBO
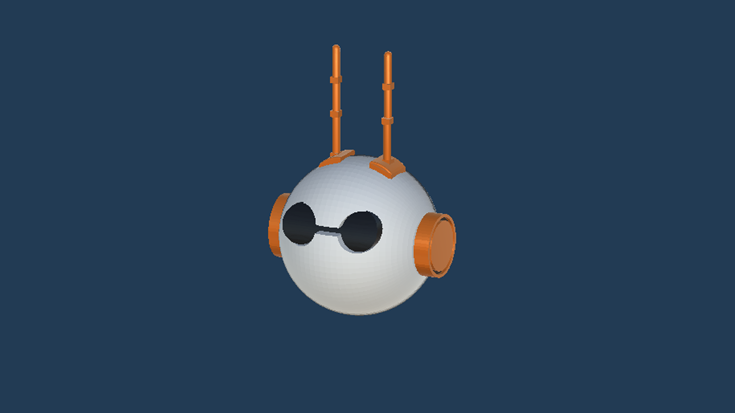
2.2 Player Hand
ประกอบไปด้วยมือซ้ายและมือขวา ในส่วนของสีสันเลือกใช้ให้เข้ากับศีรษะของ Model โดยจะเป็นสีส้มตลอดทั้ง Model


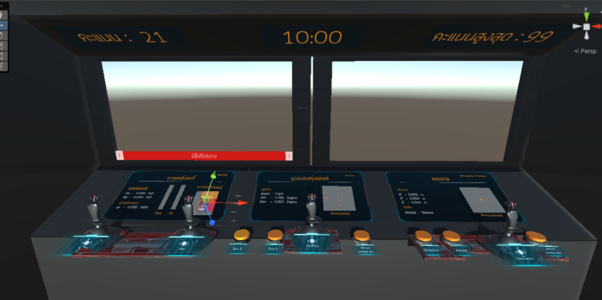
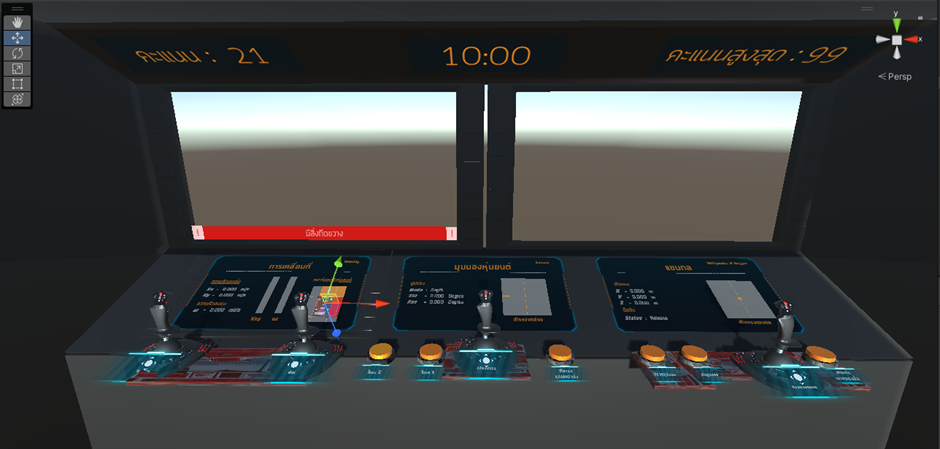
3. การแสดงผลข้อมูล
จะเป็นส่วนของการแสดงผลข้อมูลต่าง ๆ โดยจะเป็นค่า Feedback ที่ได้จาก Mobile Robot ซึ่งประกอบไปด้วยการแสดงผลในส่วนต่าง ๆ ดังนี้
3.1 MOBOT Vision

- แสดงภาพจากกล้องที่ติดอยู่กับ Mobile Robot
3.2 MOBOT Status feedback

- Camera
- Pan Tilt Position feedback
- Pan / Tilt Position Graph
- Camera Mode
- Pan Tilt Position feedback
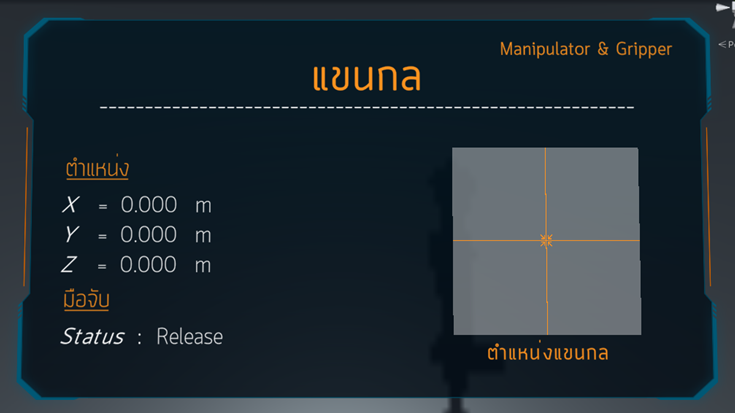
- Manipulator
- Arm Position feedback
- X Y Z Position
- Y / Z Position Graph
- Gripper Status
- Arm Position feedback

- Mobility
- Speed feedback
- Vxy : Speed Magnitude bar
- ꞷ : Speed bar
- LiDAR feedback
- Radar 8 Quadrants แสดงทิศทางของสิ่งกีดขวาง
- แถบสีเหลืองส้ม : พบสิ่งกีดขวางในระยะ (ยังสามารถเคลื่อนที่ได้)
- แถบสีแดง : พบสิ่งกีดขวาง (หยุดการเคลื่อนที่)
- Radar 8 Quadrants แสดงทิศทางของสิ่งกีดขวาง
- Speed feedback
4. การควบคุม
ผู้ใช้งานสามารถมีปฏิสัมพันธ์กับโลก VR ผ่าน Controller Model ในการสั่งงานควบคุม Mobile Robot โดยจะแบ่งเป็นการควบคุมด้วย Joystick และการสั่งงานผ่าน Button

4.1 Mobility:
ควบคุมการเคลื่อนไหวของ mobile robot โดยแบ่งเป็นการเคลื่อนที่รอบทิศ และการหมุนรอบตัวหุ่น
- XY Joystick
- W Joystick

ควบคุมการเคลื่อนไหวของ mobile robot โดยแบ่งเป็นการเคลื่อนที่รอบทิศ และการหมุนรอบตัวหุ่น
- XY Joystick
- W Joystick
4.2 Camera:

: ควบคุมกล้องทีติดอยู่กับตัวหุ่น เพื่อปรับเปลี่ยนมุมมองการมองเห็นในโลก VR และมีปุ่มกดในการสั่งการเปลี่ยนโหมดของกล้อง และปุ่มสำหรับให้กล้องหมุนกลับมาตำแหน่งเริ่มต้น
- Pan / Tilt Joystick
- Camera Color Mode Button
- Camera Depth Mode Button
- Camera Set home Button
4.3 Manipulator:

ควบคุมแขนกลให้เคลื่อนที่ไปยังตำแหน่งที่ต้องการ และมีปุ่มกดในการสั่งการให้ Gripper จับหรือปล่อย และปุ่มสำหรับสั่งงานให้แขนกลเคลื่อนที่กลับมาตำแหน่งเบื้องต้น
- YZ Joystick
- Manipulator Set home Button
- Gripper Grip Button
- Gripper Release Button