
Hardware Implementation
META MOBOT ประกอบขึ้นมาจากอุปกรณ์หลายส่วน ไม่ว่าจะเป็นระบบโครงสร้าง ระบบขับเคลื่อน ระบบไฟฟ้า ระบบประมวลผล ๆลๆ เพื่อให้ MOBOT สามารถรับสัญญาณคำสั่งจาก Users เพื่อนำมาประมวลผล และทำงานในสถานที่ต่าง ๆ ได้ตามที่ Users ต้องการ โดยการอธิบายในส่วนของอุปกรณ์ (Hardware) ของ META MOBOT สามารถแบ่งย่อยเป็นส่วนต่าง ๆ ได้ดังนี้
- โครงสร้าง และ ระบบขับเคลื่อน (Mobility)
- แขนกล และ Grippers (Manipulation)
- ระบบจ่ายพลังงาน
- ชุดวงจรควบคุม
ชุดโครงสร้าง และระบบขับเคลื่อน (Mobility)
ชุดโครงสร้างหลักของ META MOBOT ทำจาก Aluminium Profile ขนาด 30 mm. x 30 mm. เป็นส่วนที่ใช้ติดตั้งและเชื่อมต่ออุปกรณ์ทุกตัวเข้าด้วยกัน ทั้งส่วนล้อ แขนกล ระบบไฟฟ้า ๆลๆ โดยในส่วนของโครงสร้างและระบบขับเคลื่อนมีรายละเอียดดังนี้
- META MOBOT มีระบบขับเคลื่อนแบบใช้ล้อ Mecanum 4 ล้อ ต่อกับ Dynamixel MX106 จำนวน 4 ตัว ทำให้ MOBOT สามารถเคลื่อนที่ไปได้ในทุกแนวการเคลื่อนที่
- มีการต่อเติมโครงสร้างท้ายรถเพิ่มขึ้นมาจากโครงชุดเดิม โดยเชื่อมต่อโครงทั้งสองด้วยเพลา เพื่อแก้ปัญหาล้อ Mecanum ลอยจากพื้นต่างระดับ
- Skin ของโครงสร้าง ทำจาก Acrylic ที่ออกแบบ ให้เข้ากับอุปกรณ์ที่ติดตั้งอยู่ และสามารถเปิด-ปิด เพื่อเข้าไปแก้ไขระบบไฟฟ้าภายในระบบได้ง่าย






แขนกล และ Grippers (Manipulation)
META MOBOT มีแขนกลแบบ Revolute 1 แขน ติดตั้งอยู่บริเวณด้านหน้าของตัวหุ่น ไว้สำหรับหยิบจับสิ่งของต่าง ๆ ที่อยู่ด้านหน้าของ MOBOT โดยตัวแขนกล-มือจับ (Grippers) มีรายละเอียดดังนี้
- ROBOTIS OpenMANIPULATOR P เป็นแขนกล 6-DoF ที่ติดตั้งอยู่บน META MOBOT มีหน้าที่หยิบจับสิ่งของต่าง ๆ โดยเมื่อติด Gripper สามารถรับน้ำหนักได้ประมาณ 1 Kg.
- Grippers เป็นแบบ 4-Bar Mechanism มีขนาดใหญ่ สามารถหยิบจับวัตถุได้หลายแบบ เช่น ลูกบอล เป็นต้น ภายในมี Dynamixel MX-64R เป็นตัวส่งกำลังกำลัง [SPIDRA Gripper]



ระบบพลังงาน
ระบบพลังงานของ META MOBOT ทำหน้าที่ในการจ่ายพลังงานให้แก่อุปกรณ์ไฟฟ้าทุกชิ้นในระบบ โดยสามารถทำการเปิดปิดวงจรได้ทั้งแบบโดยตรง และ แบบเขียนโปรแกรมควบคุม ระบบพลังงานมีรายละเอียดดังนี้
- ใช้พลังงานจากแบตเตอรี่ Li-ion 24V 30Ahซึ่งจะทำให้สามารถทำงานได้โดยประมาณ 1-2 ชั่วโมง
- มีวงจรควบคุมที่ใช้ในการรับค่าจากปุ่ม – แสดงผลสถานะทั่วไปของระบบ และสามารถควบคุมเวลาในการตัดต่อพลังงานได้ [OF-TMSRK-CT011]
- มีช่องจ่ายพลังงานให้เลือกหลายแรงดัน (5V, 12V, 24V) และมี Breakers ป้องกันในทุกแรงดัน
- แผนผังระบบจ่ายพลังงานของ META MOBOT [Electrical (Power) Circuit]



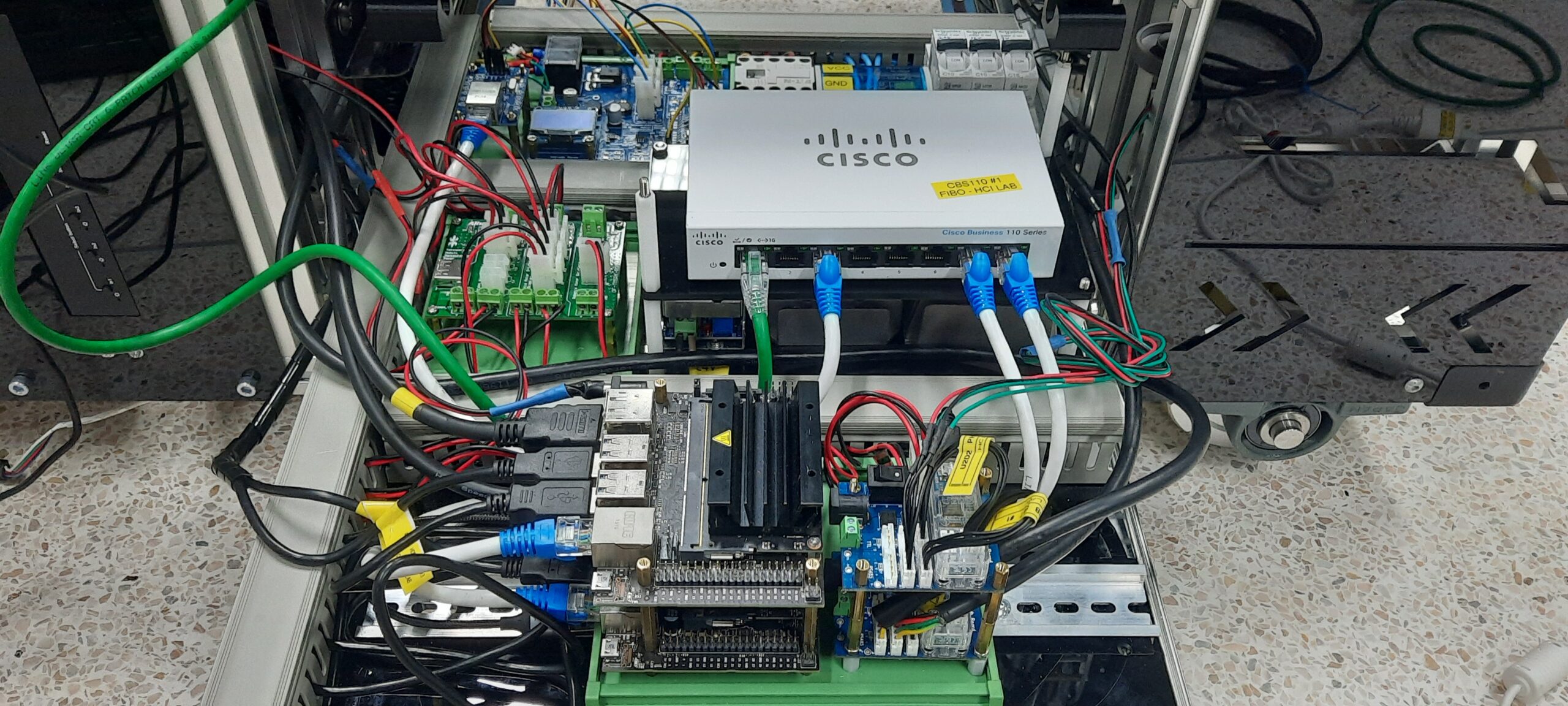
ชุดวงจรควบคุม
เป็นชุดวงจรสำหรับใช้ในการรับค่าสัญญาณ ประมวลผลข้อมูลต่าง ๆ และสั่งการ Actuators ให้ทำงานตามคำสั่งที่ประมวลผลได้ เช่น การสั่งการเคลื่อนที่ของ MOBOT, การควบคุมแขนกล การส่งสัญญาณภาพ เป็นต้น โดยมีรายละเอียดดังนี้
- ใช้ NVIDIA Jetson nano จำนวน 2 ตัวในการควบคุมระบบ โดยแบ่งเป็น ชุดควบคุมการทำงานของระบบ [Mobility – Manipulation] และ ระบบ [Camera Vision]
- ใช้ KVM HDMI Switch ช่วยในการสลับหน้าจอ HDMI
- ใช้ Ethernet Switch Hub เชื่อมต่อ Jetson nano เข้ากับ Router เพื่อสื่อสารกับระบบภายนอก
- ใช้กล้อง ZED mini ในการส่งภาพมุมมองของตัวหุ่นไปที่ UI – Interface Server (ควบคุมมุมกล้องด้วย Dynamixel MX28-R) ผ่าน Hollyland HDMI Transmitter
แผนผังการเชื่อมต่ออุปกรณ์ และ ชุดวงจรควบคุมต่าง ๆ


