Objectives
- เพื่อออกแบบและศึกษาการทำงานของ Articulated robot 6 DOF และ Cartesian Robot
- เพื่อศึกษาการแก้ปัญหา Rubik’s Cube ด้วยระบบตรวจสอบภาพจากกล้องโดยวิธี mage processing
System Scenario
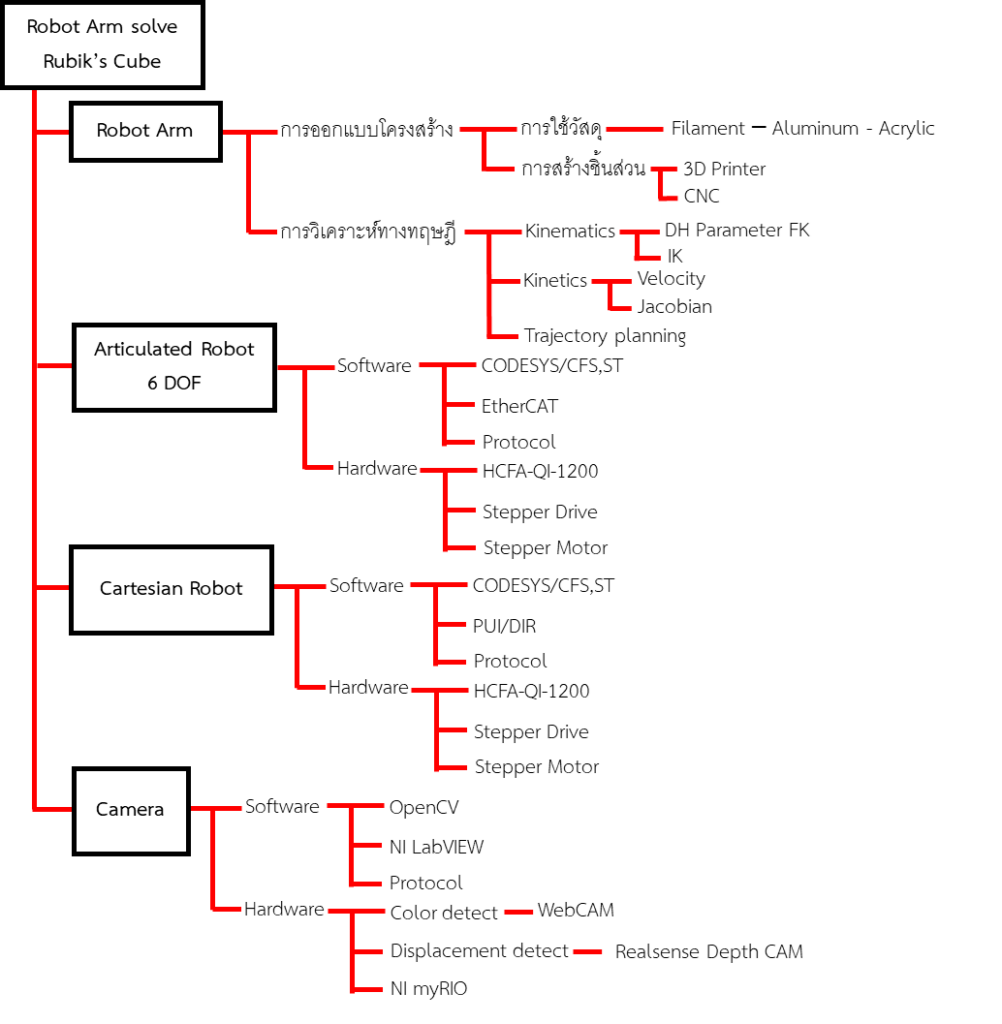
System Overview
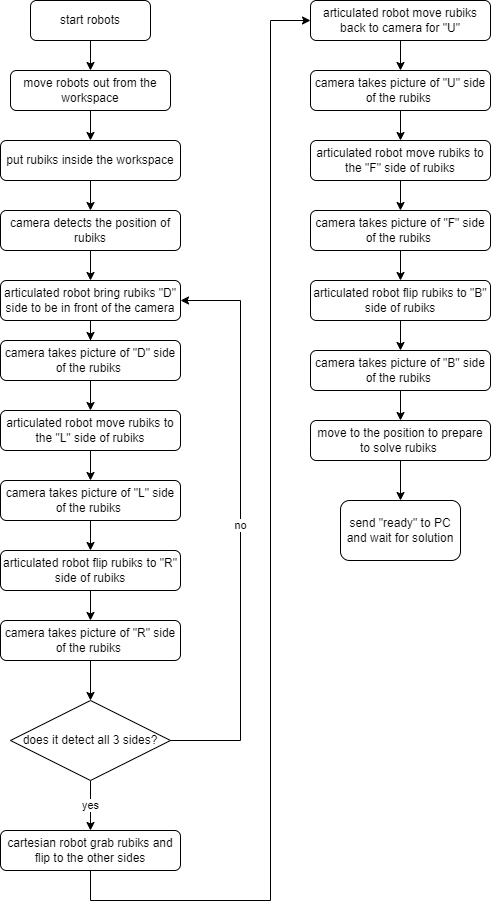
- Flowchart
- state 1: before sending data to PC
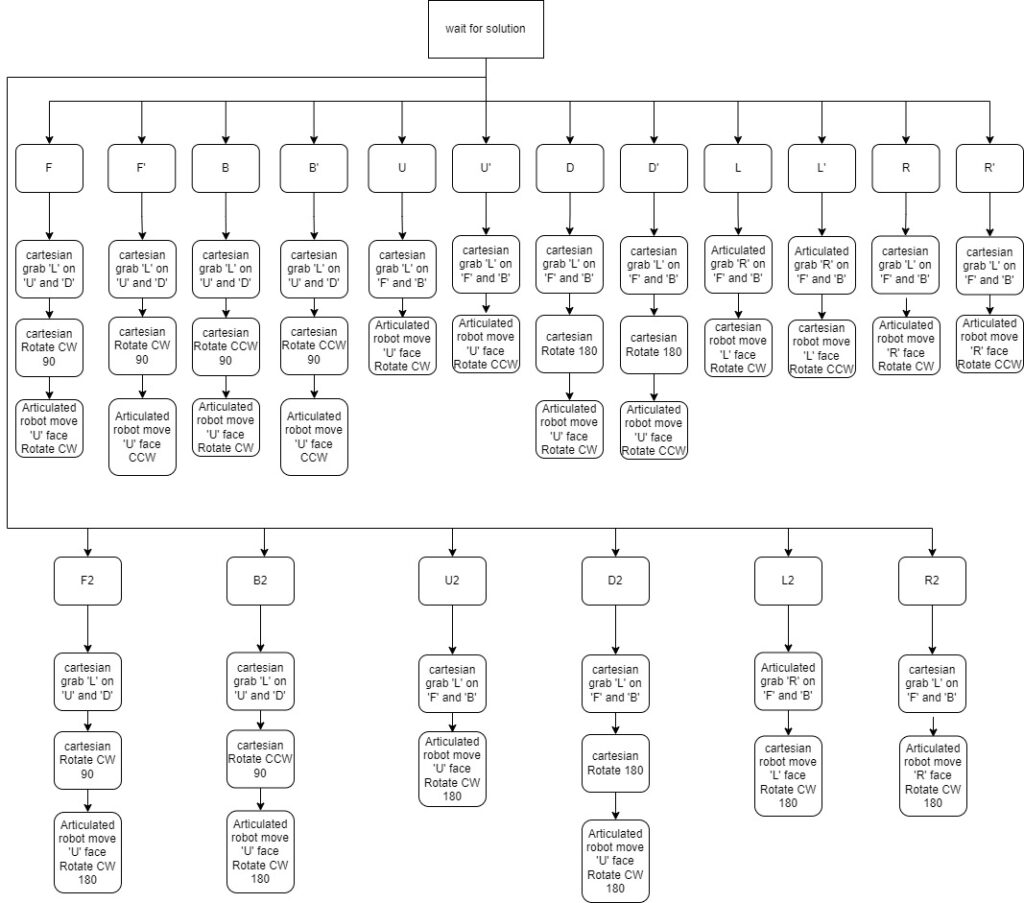
- state 2: Rubik’s solution on robot side
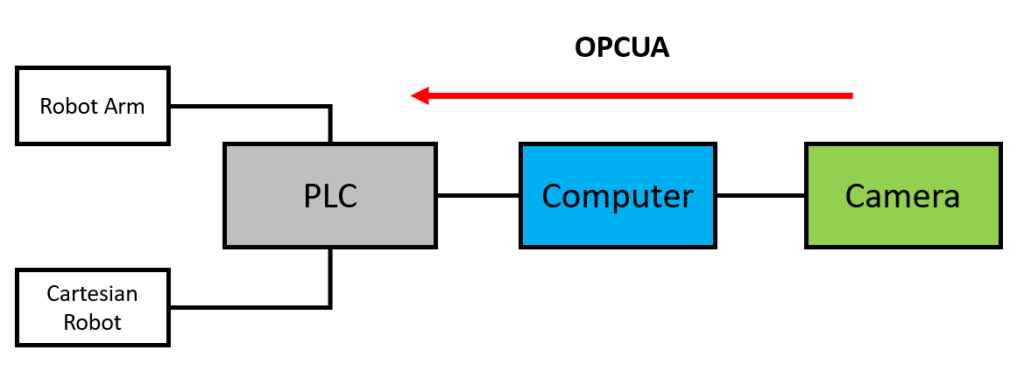
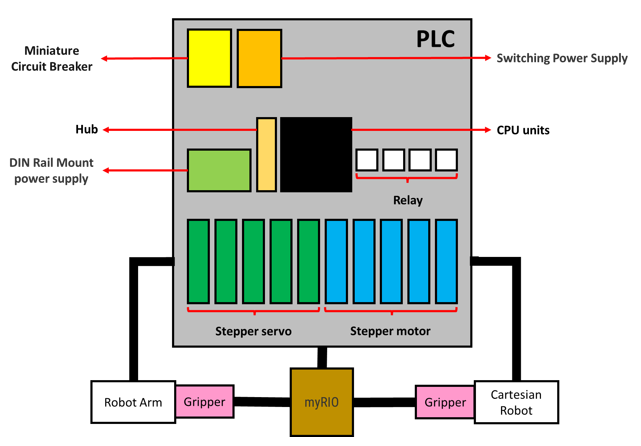
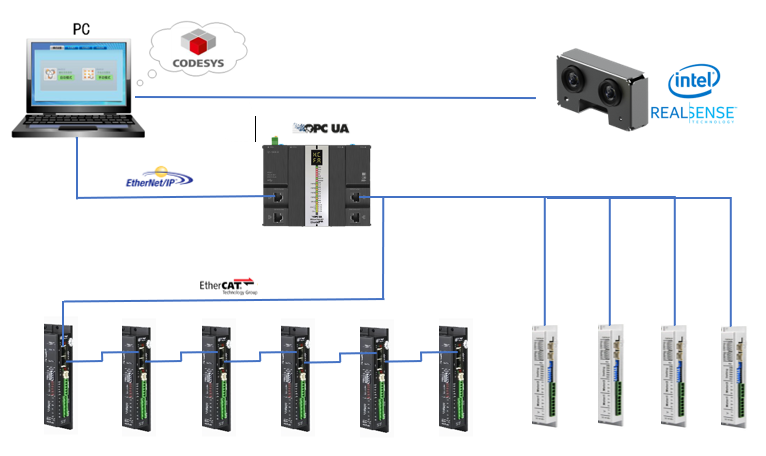
- System topology
- Simulation Robot Arm
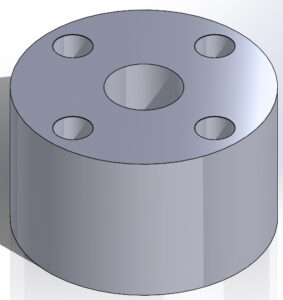
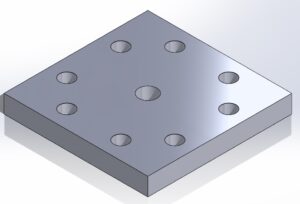
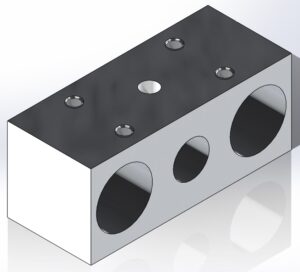
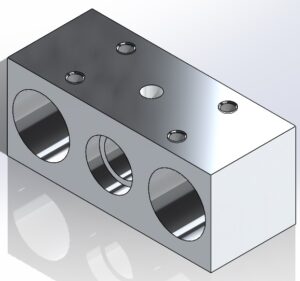
Design
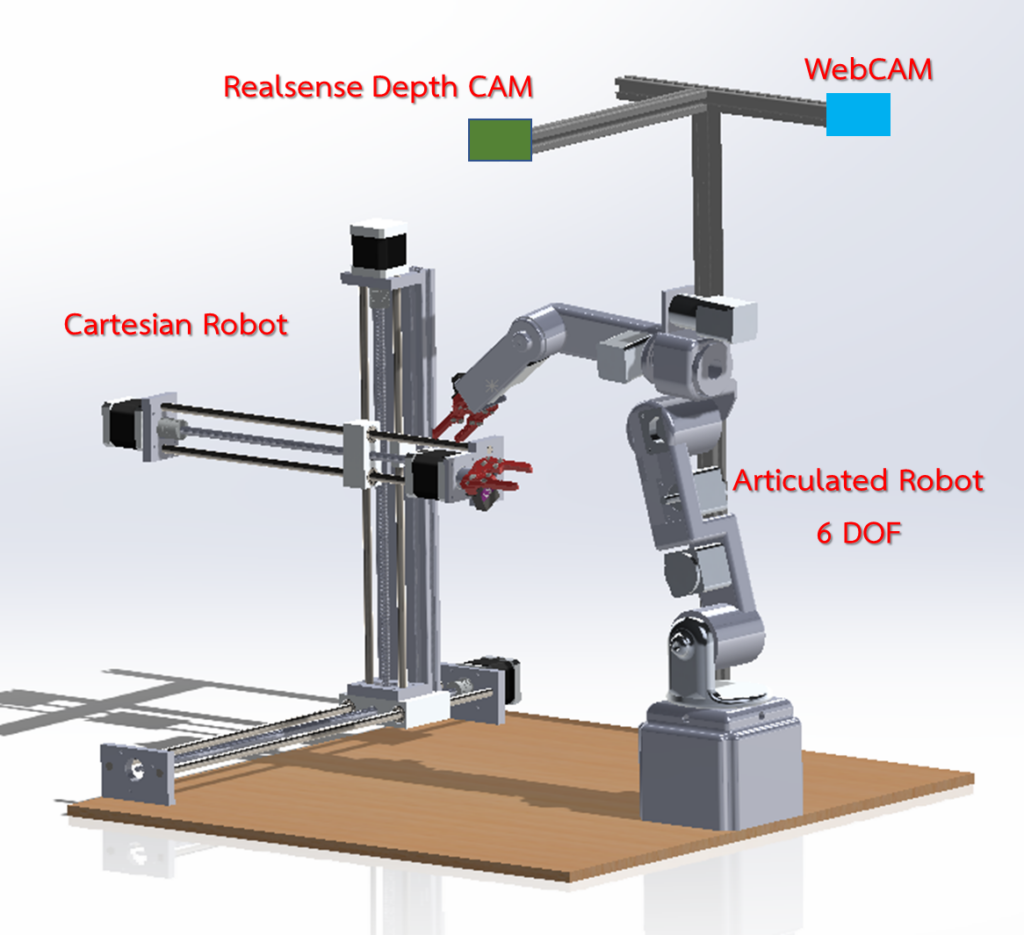
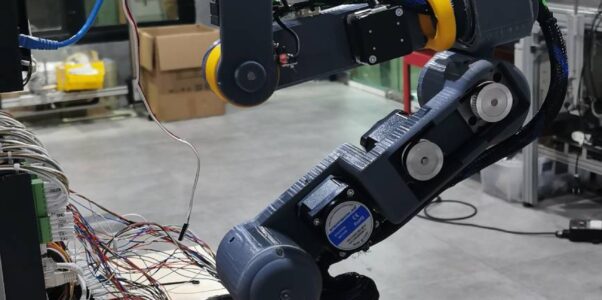
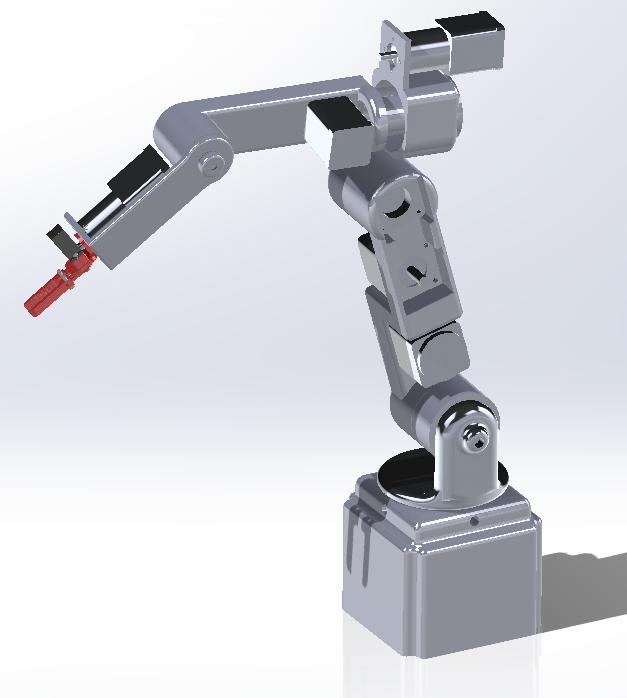
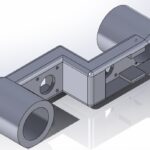
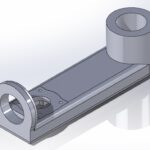
- Articulated Robot 6 DOF



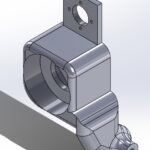

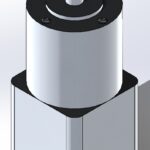
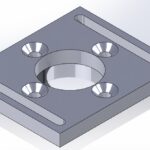

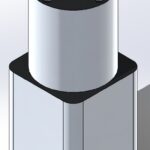

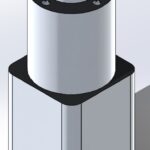

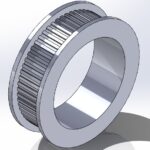

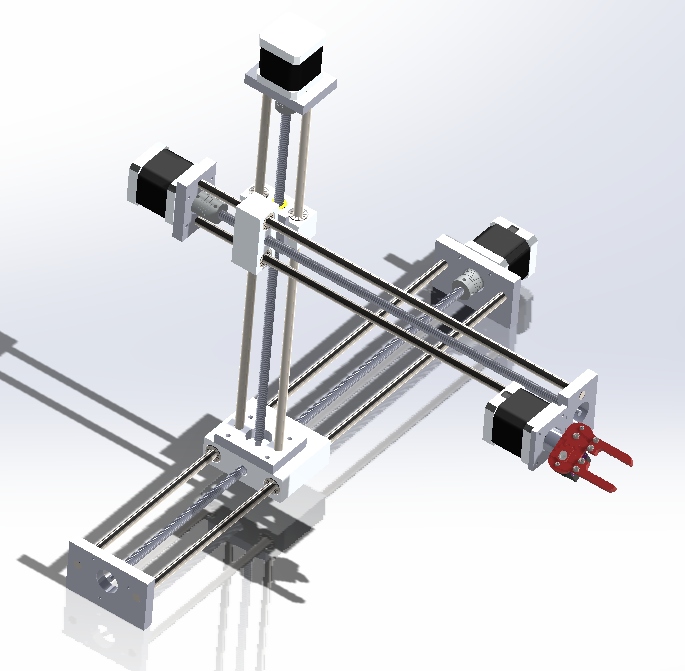
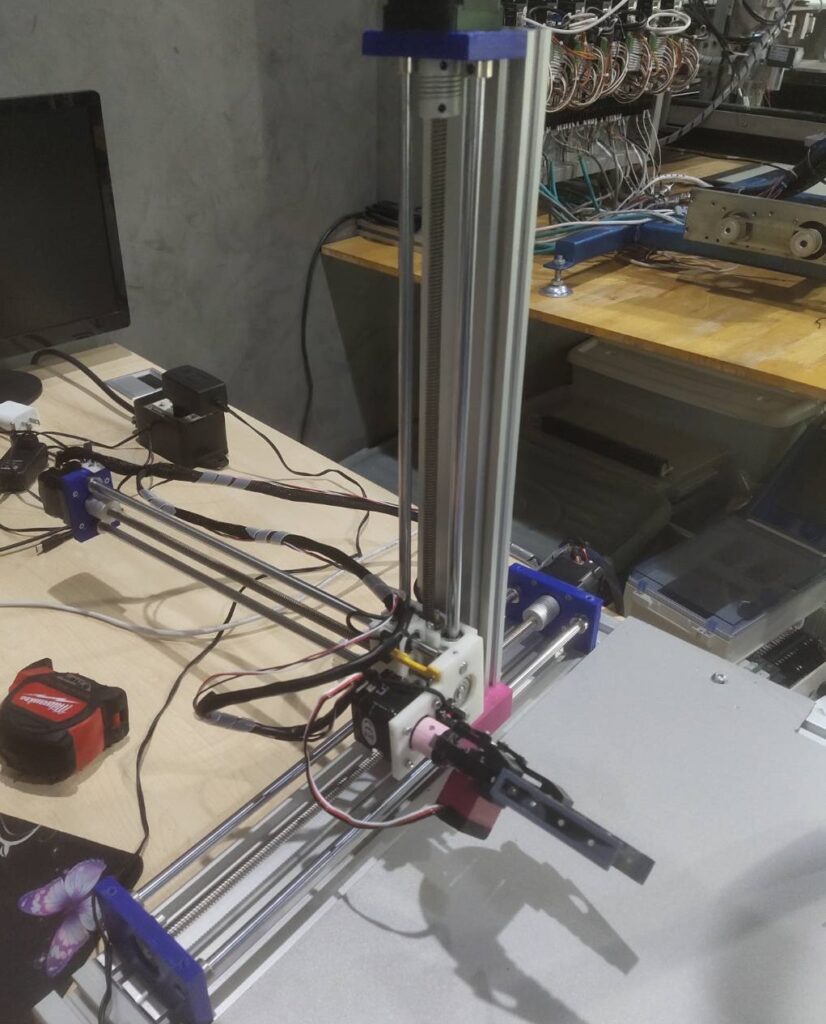
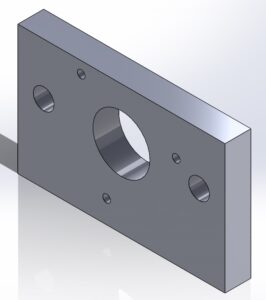
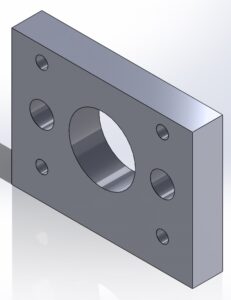
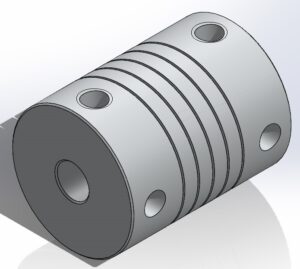
- Cartesian Robot








DH parameter & Forward kinematics & inverse kinematics
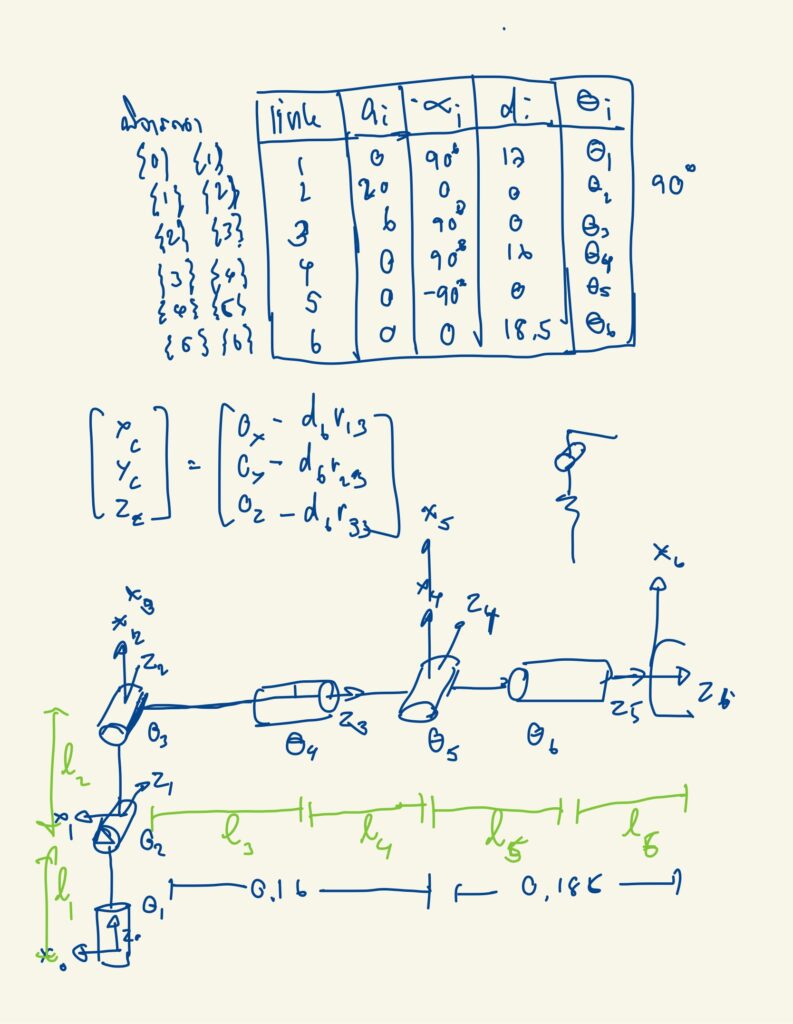
- DH Parameter
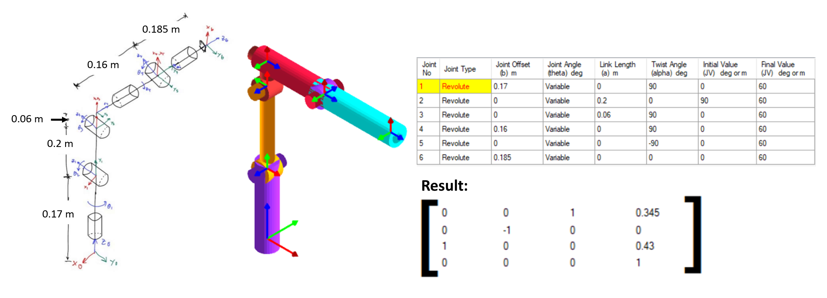
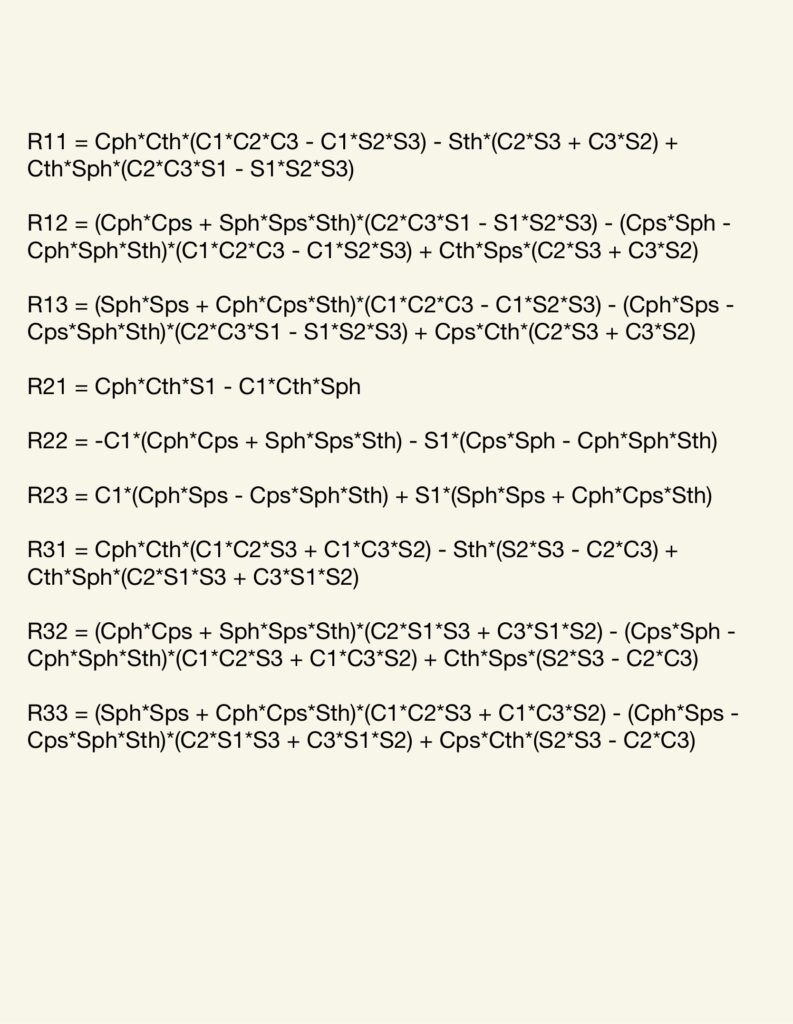
- Forward kinematics
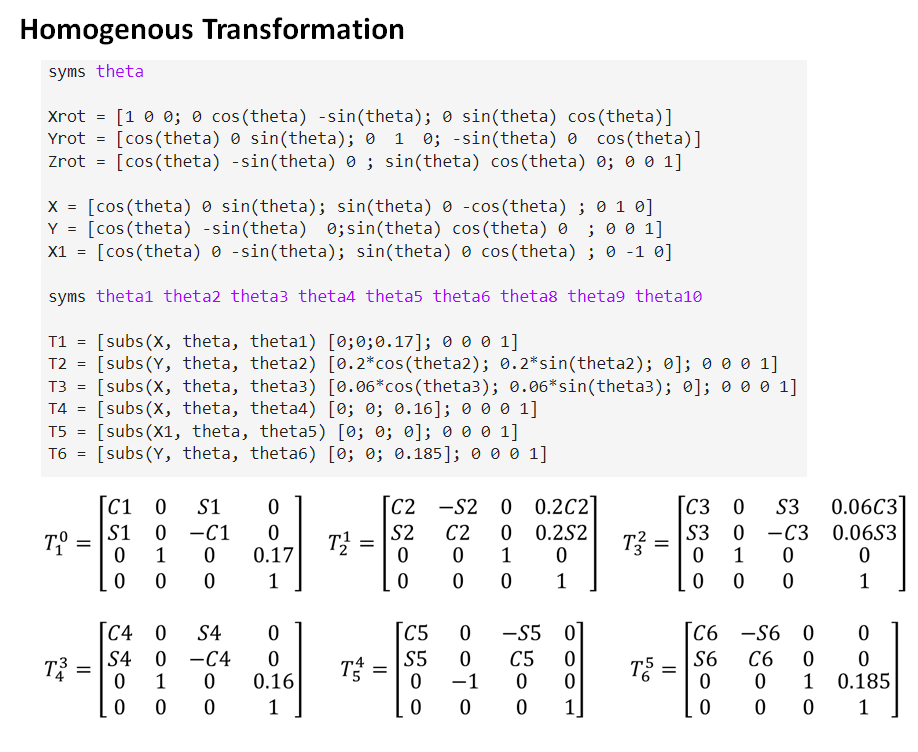
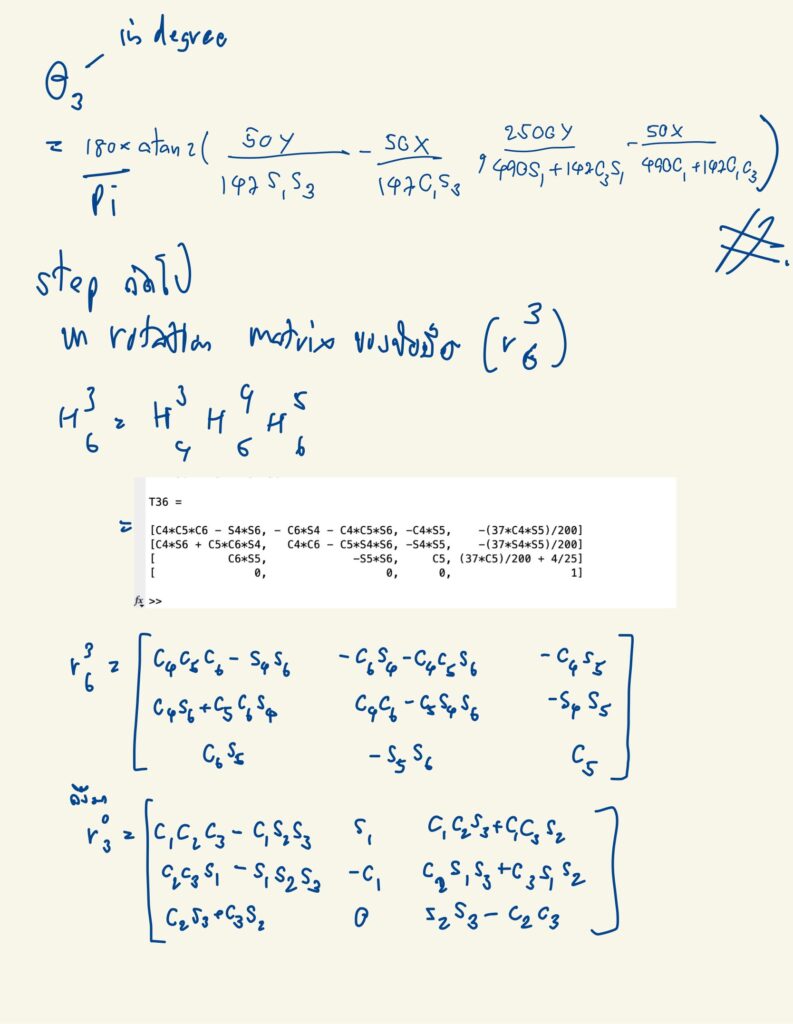
ทำ Homogenous Transformation เพื่อทำ transformation matrix ในการหา Forward kinematics
Transformation matrix
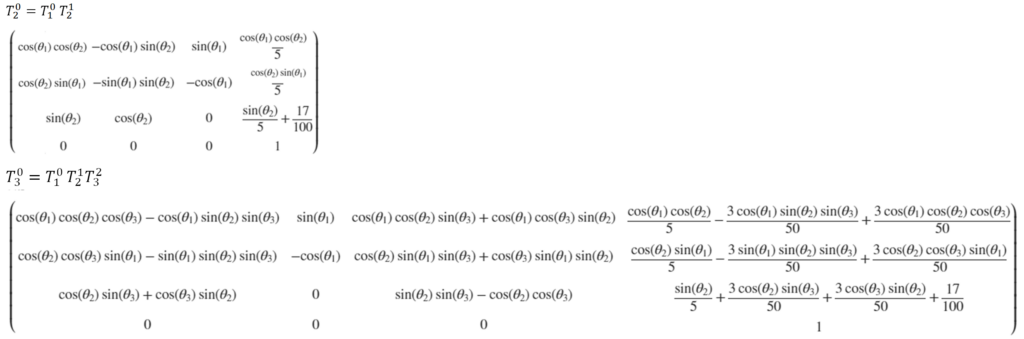

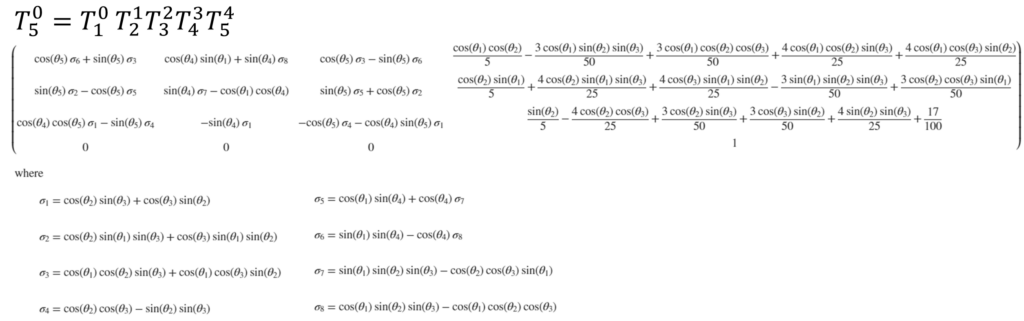
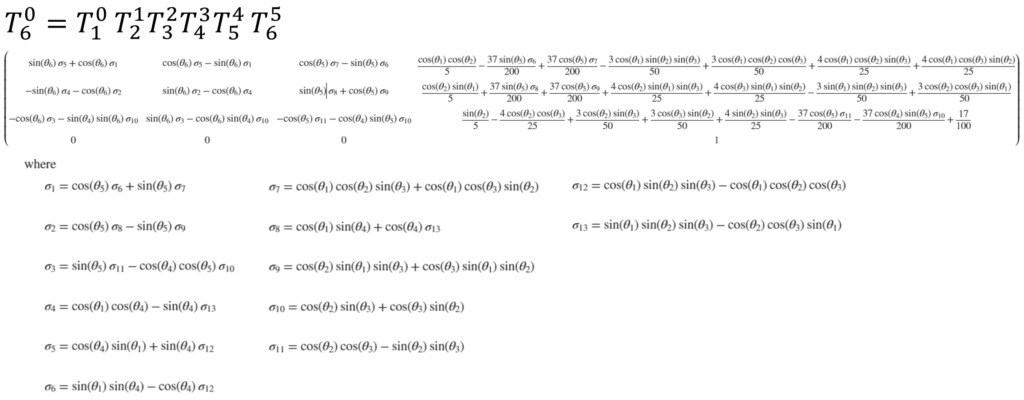
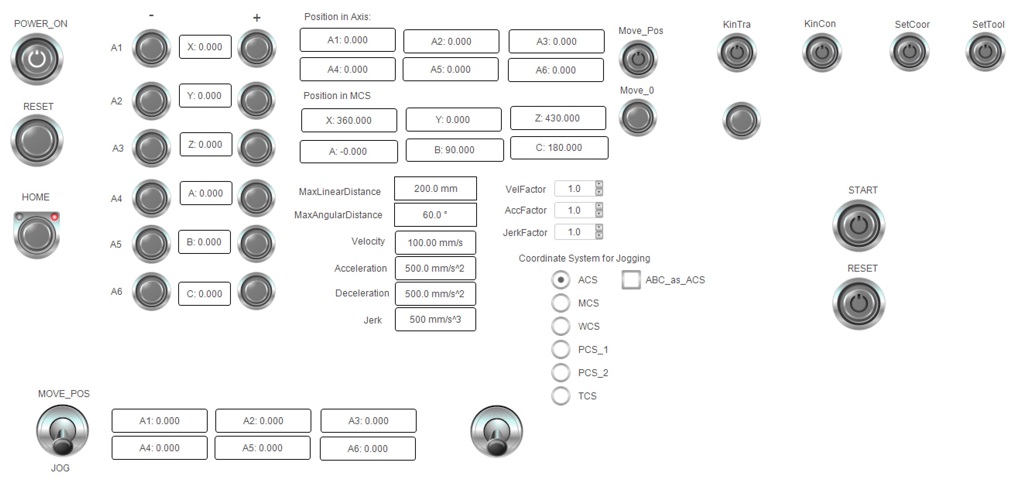
หลังจากที่ทำTransformation matrix จะได้ ค่า Forward kinematics เป็น T6 จากนั้นนำผลลัพธ์นี้แทนค่า theta เข้าไปทั้งหมดตามภาพด้านล่างจะได้ผลลัพธ์ที่ตรงกับ Articulated Robot 6 DOF ซึ่งหมายความว่าสมการที่เราสร้างนั้นถูกต้อง

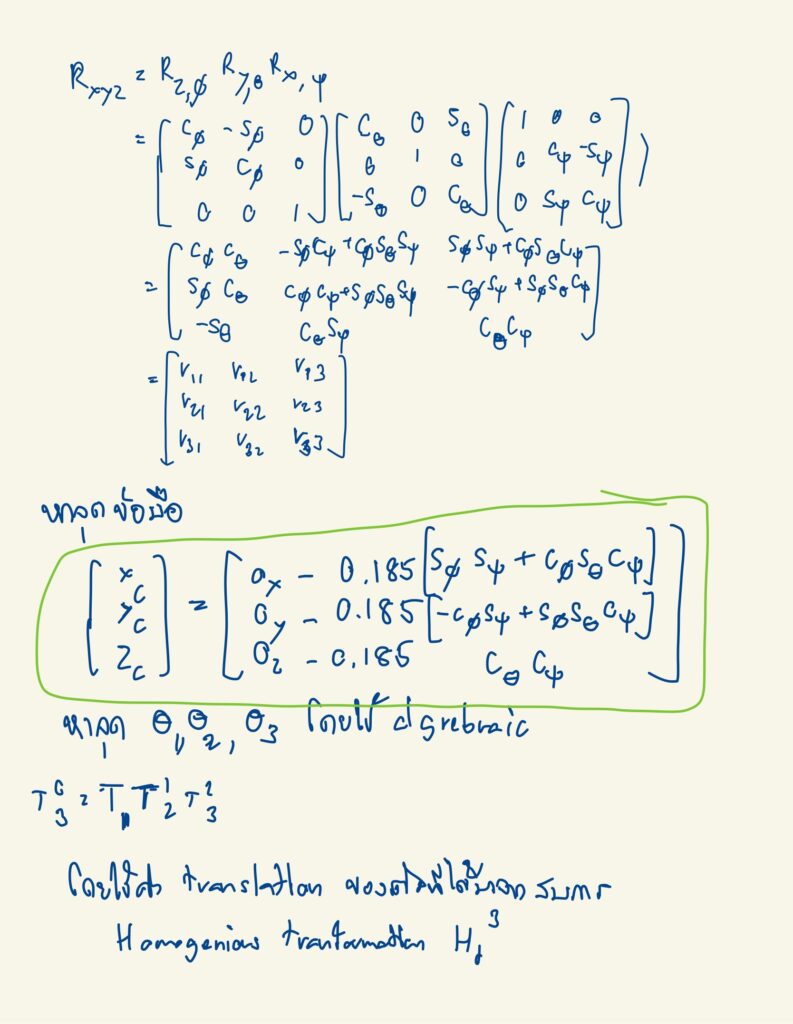
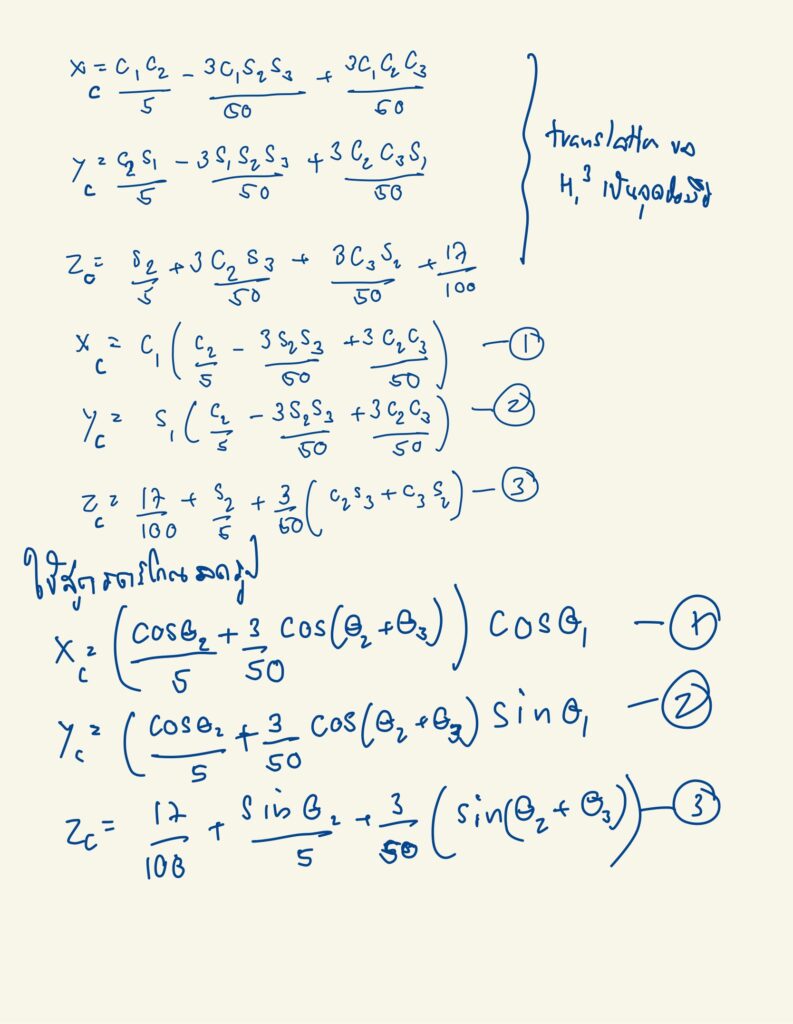
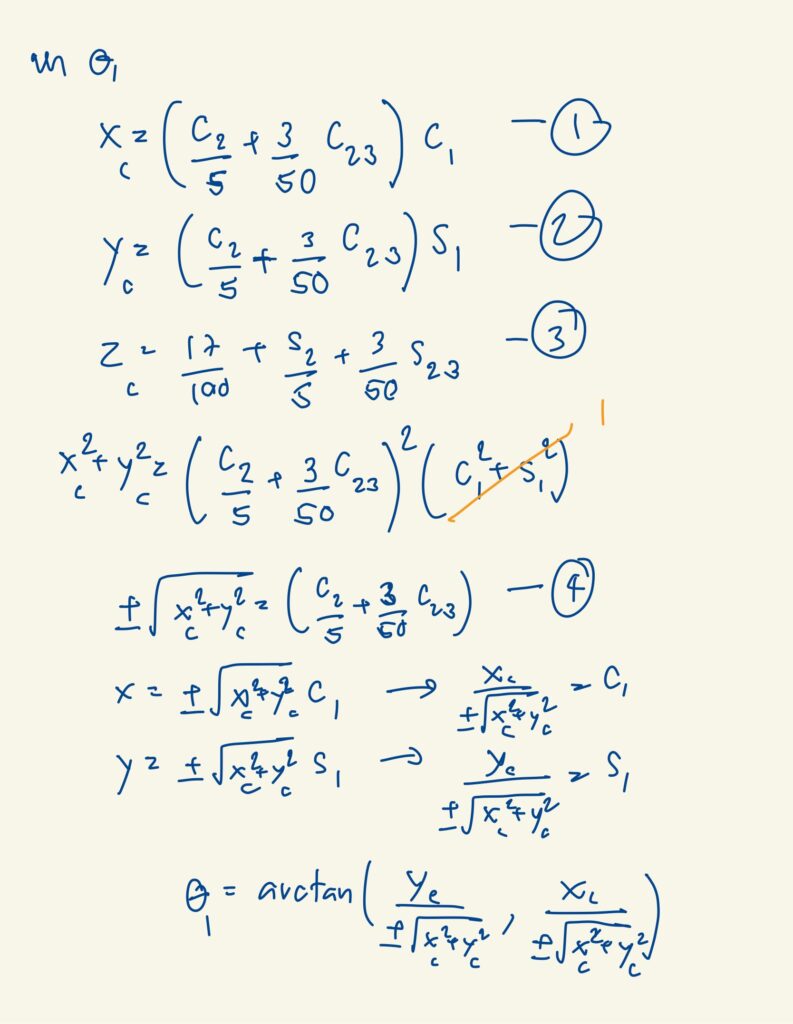
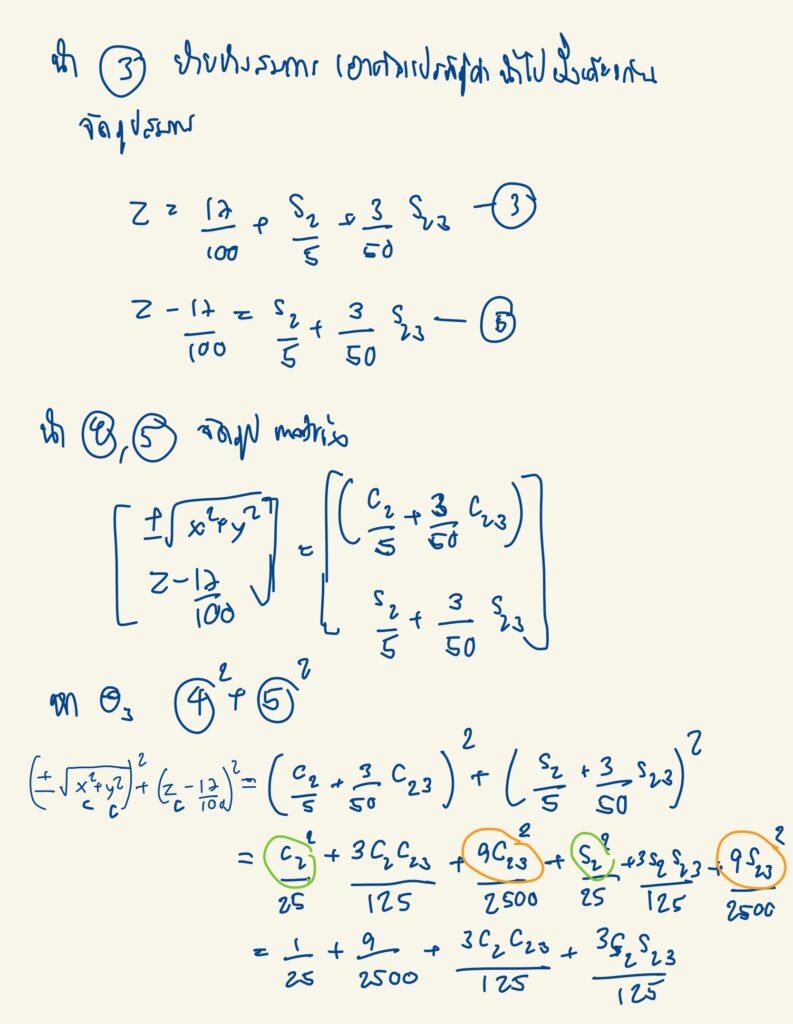
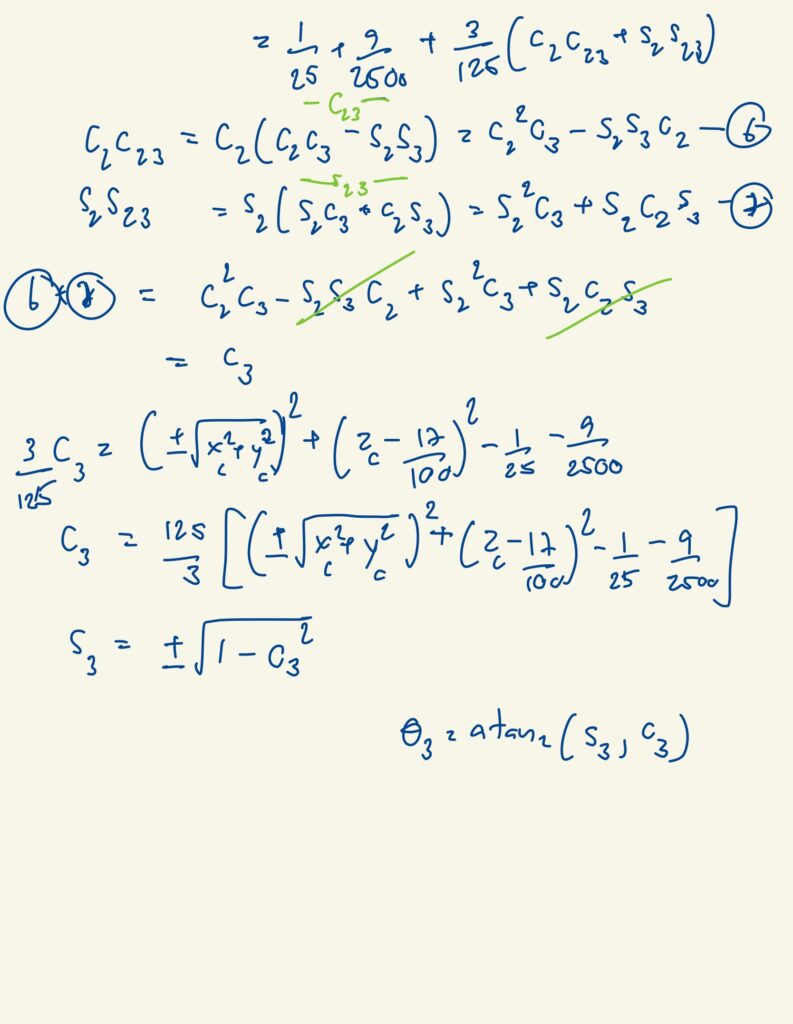
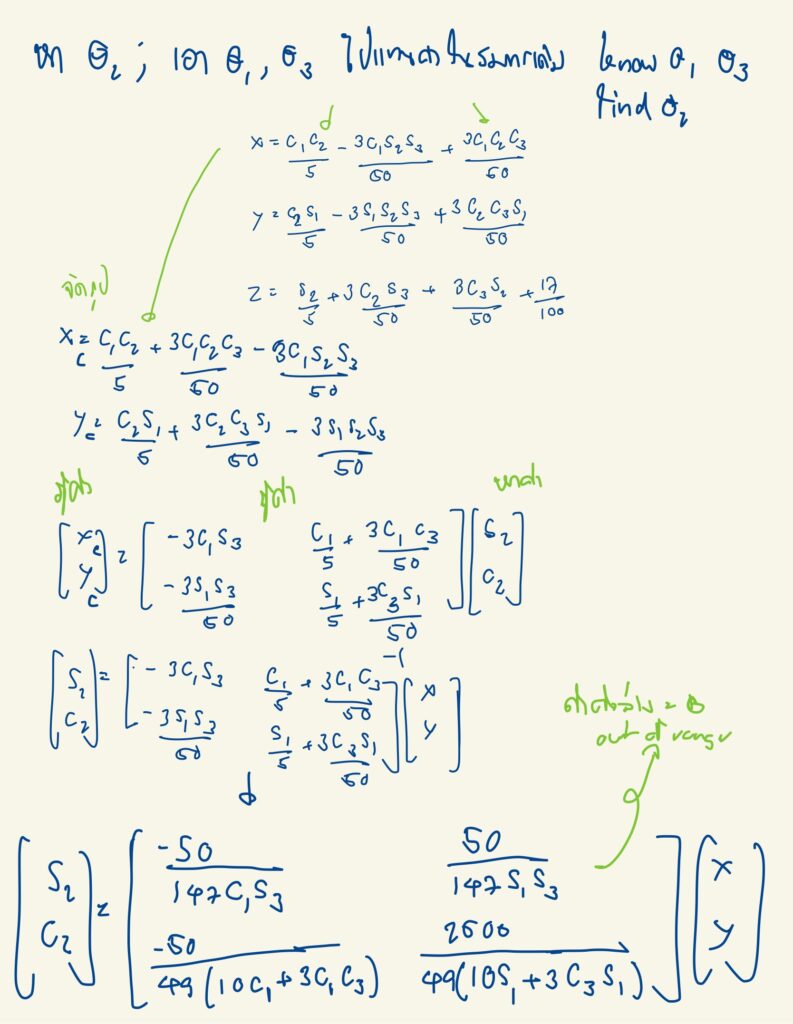
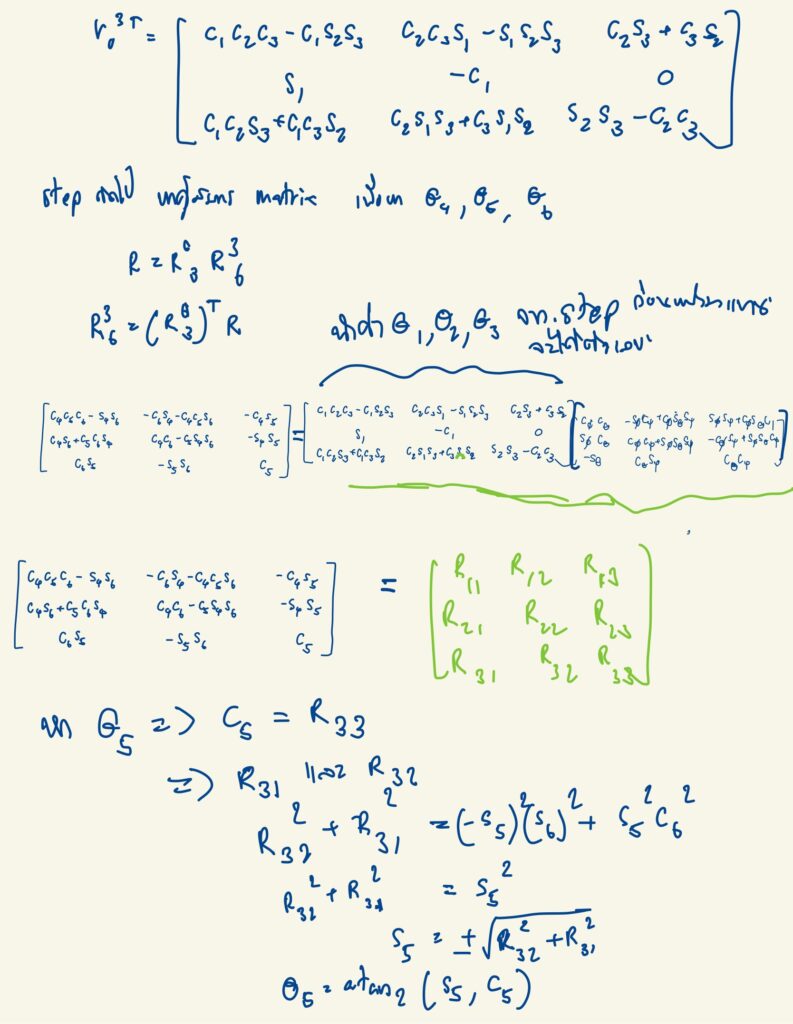
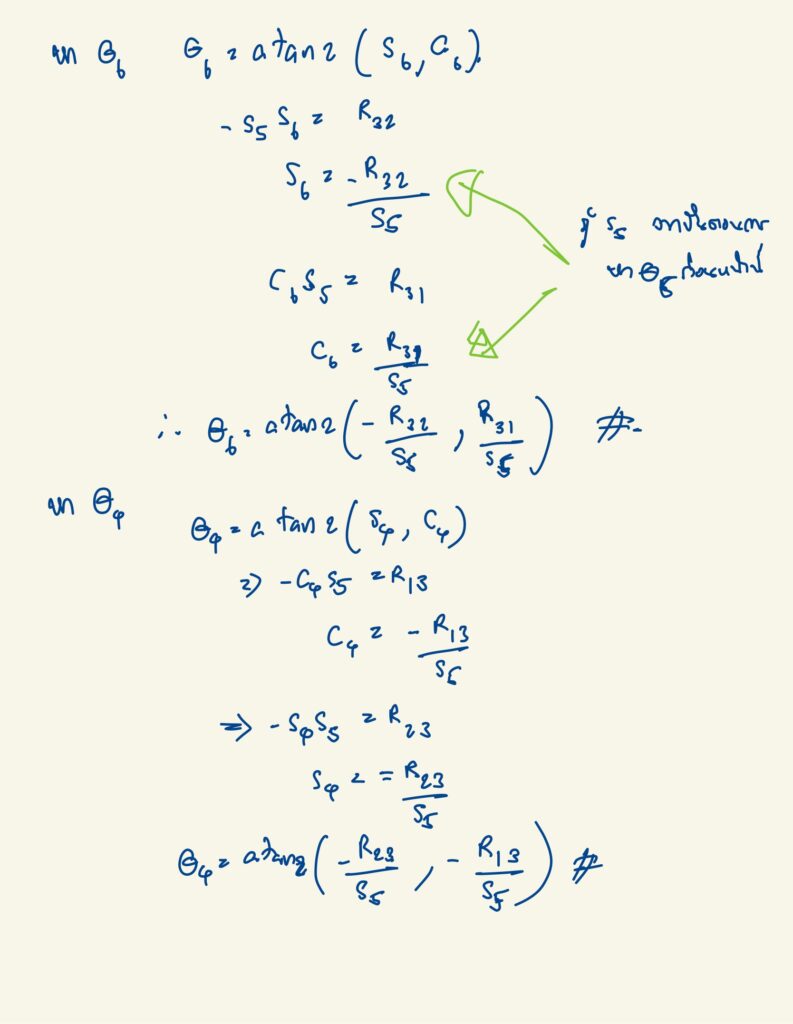
inverse kinematics of the articulated robot
Software design overview
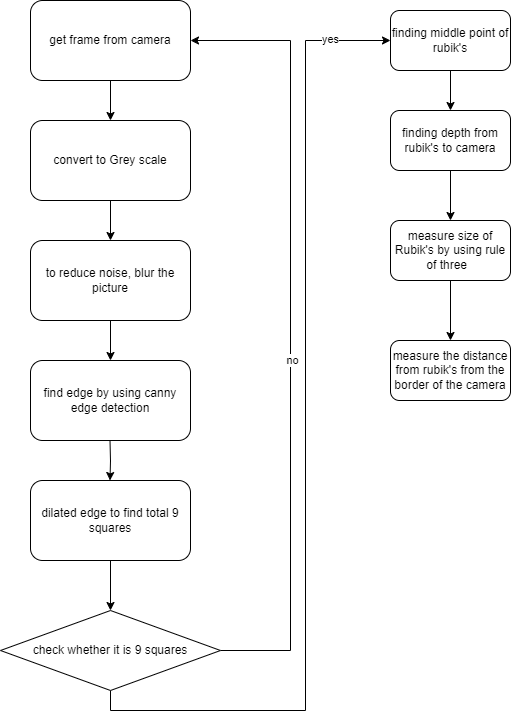
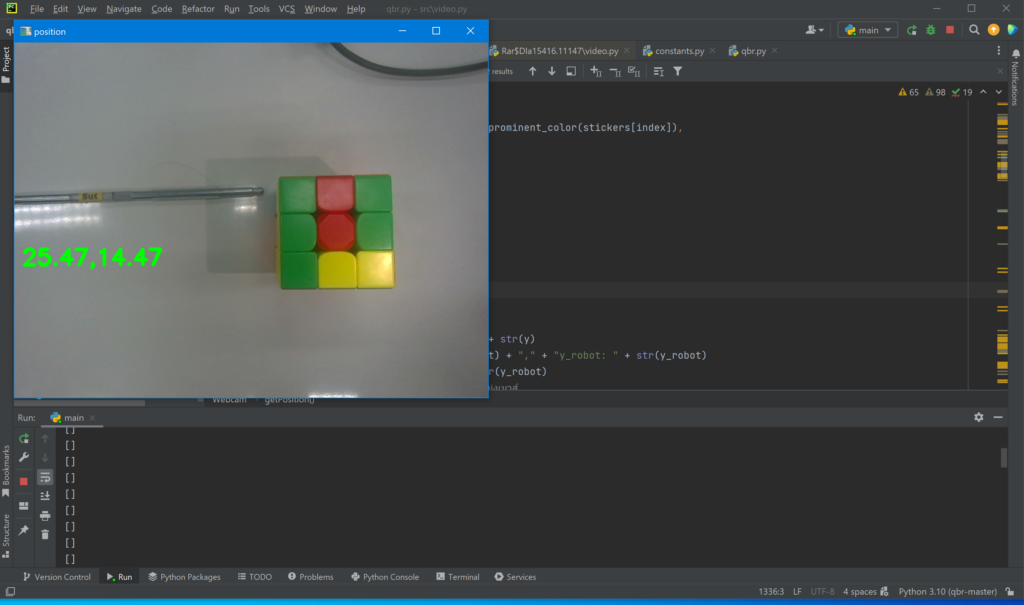
- Flowchart to find the location of rubik’s
- Flowchart to solve rubiks on PC
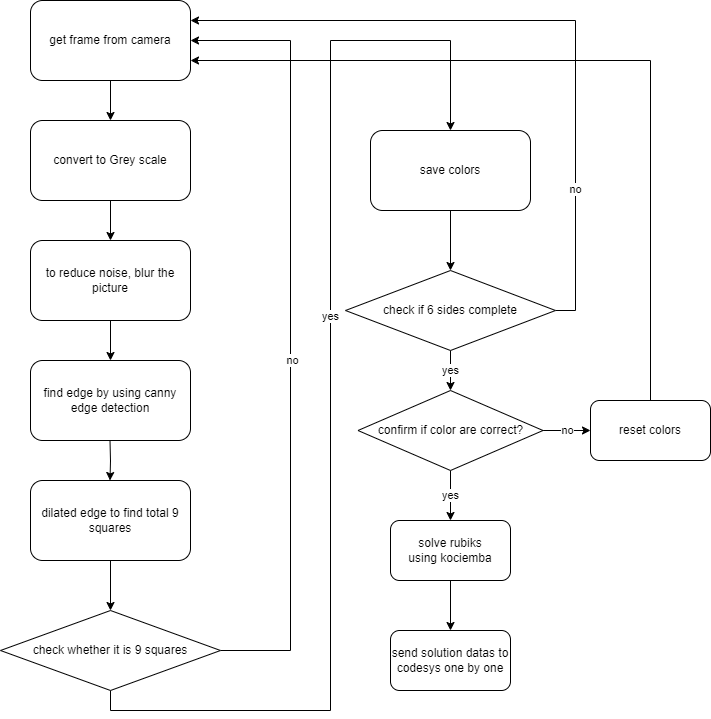
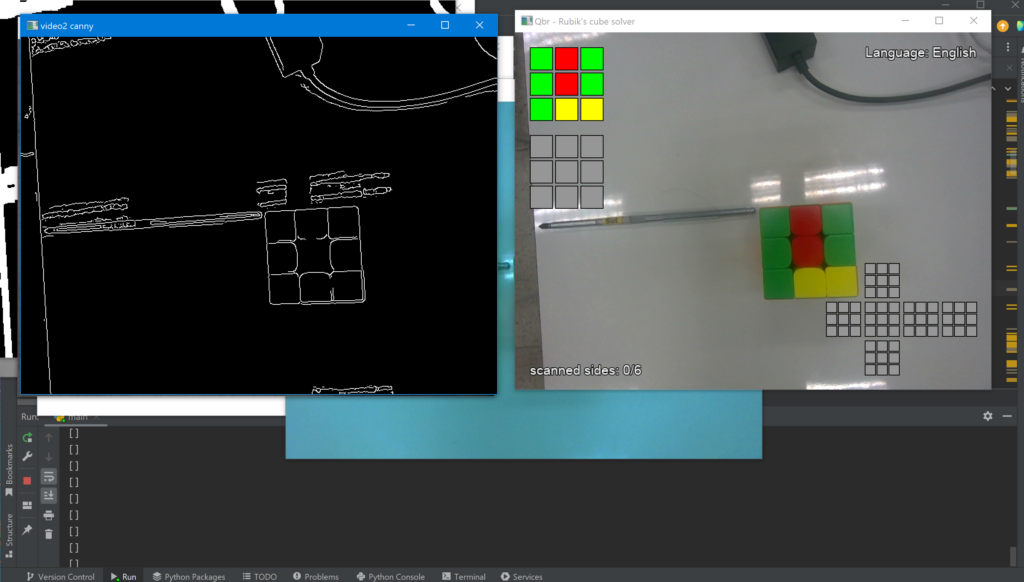
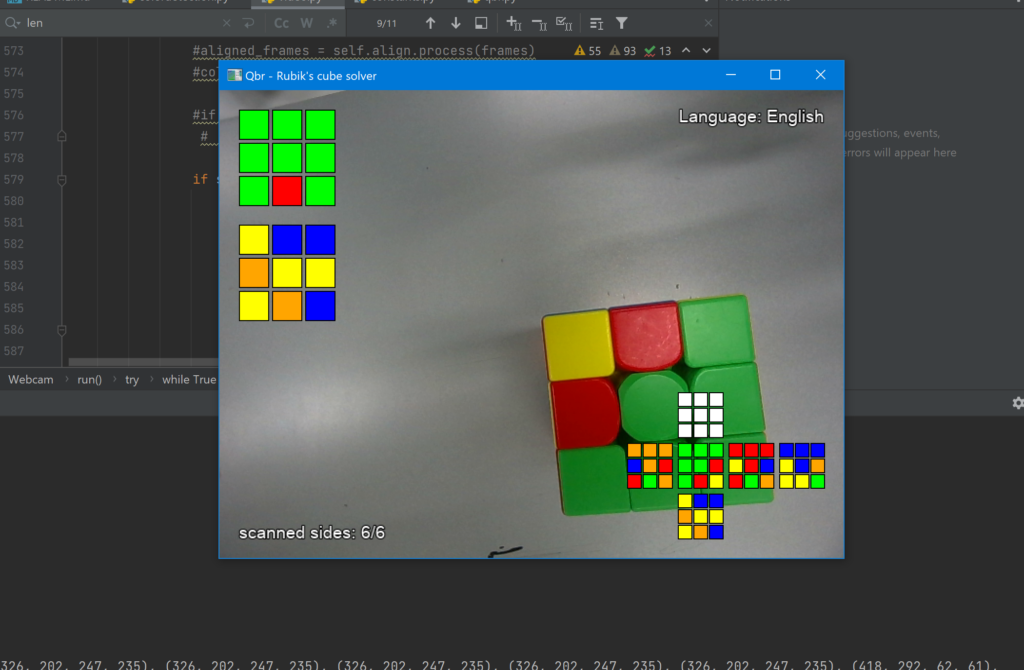
Image processing
We find the edge of the rubiks using canny edge detection technology.
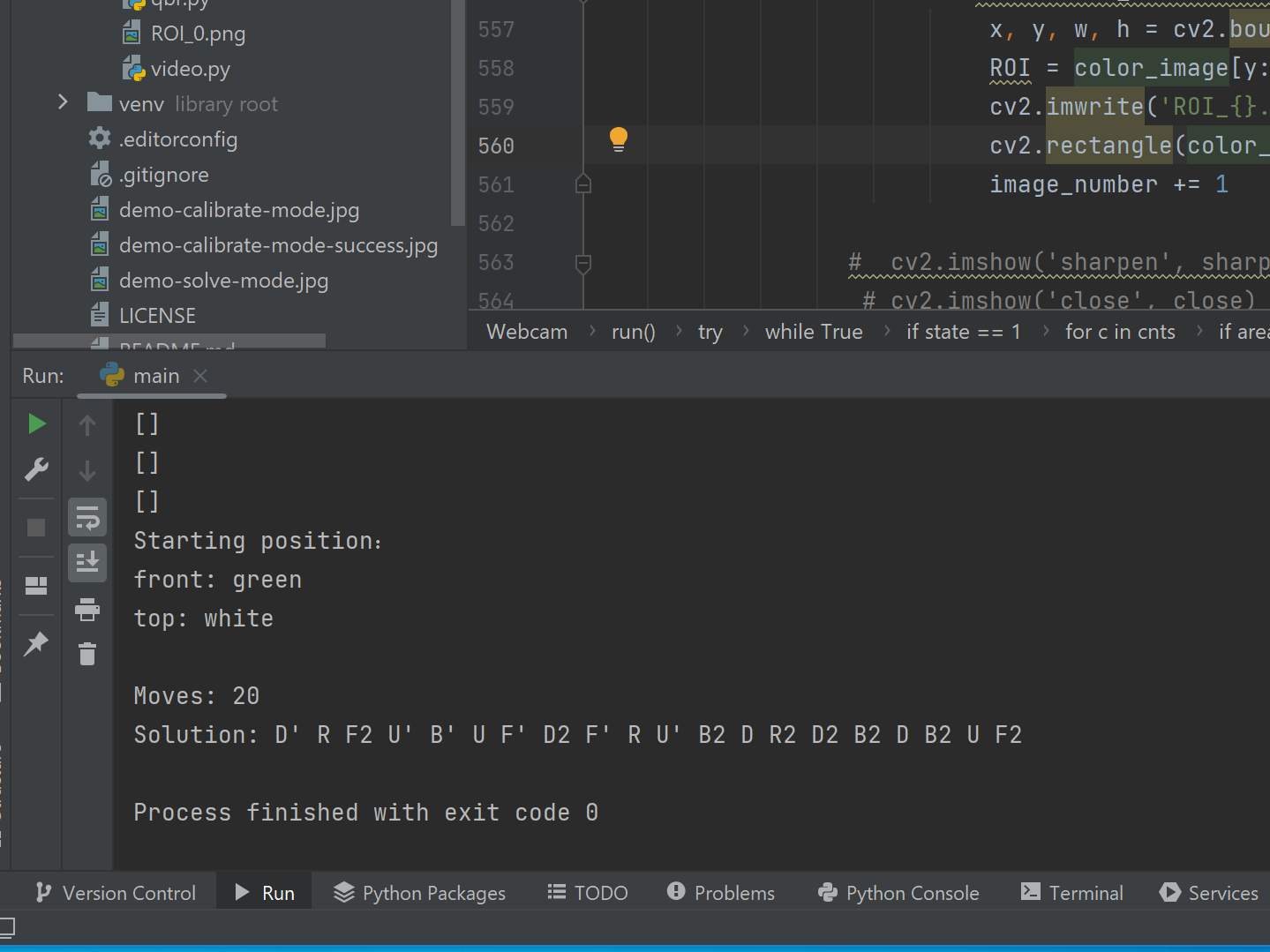
Solving Rubik’s
จากการอธิบาย flow chart ข้างต้น เรา solve rubiks โดยใช้ library ของ kociemba
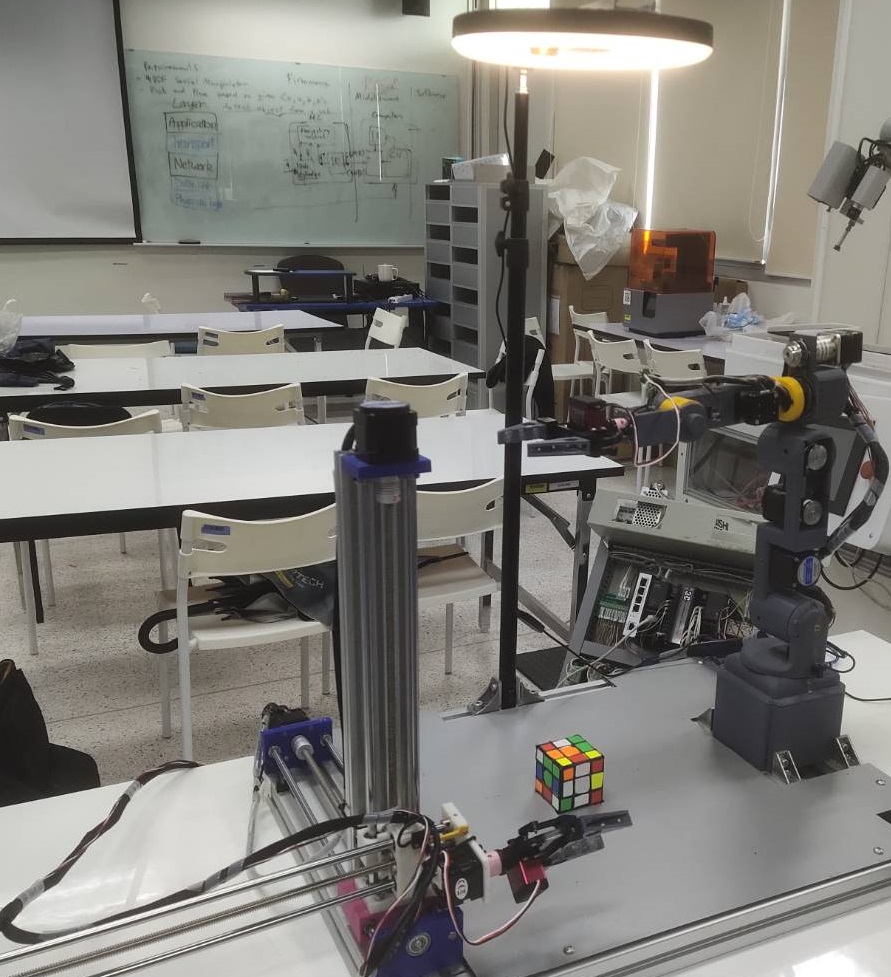
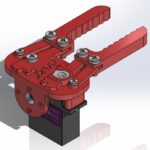
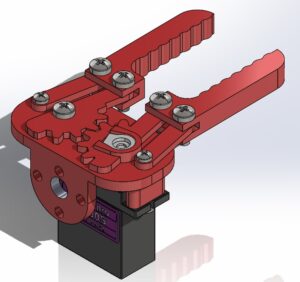
Implementation
รายชื่อผู้จัดทำ
- นายอรุณ สุขแก้ว 64340800002
- นายณรงค์รัชช์ อู่สิริมณีชัย 65340700403
- นายวุฒิชัย พิพัฒน์มโนมัย 65340700410