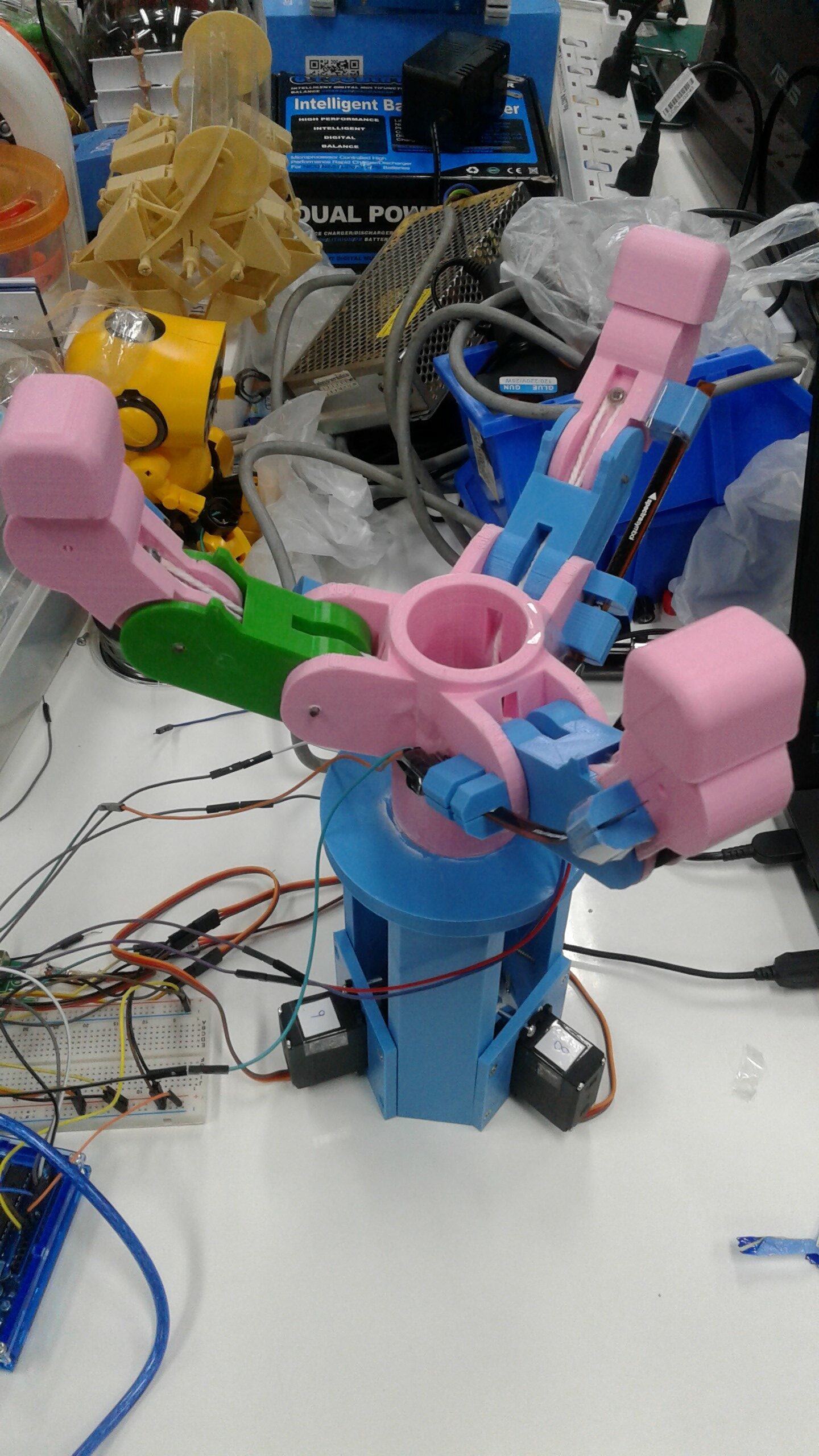
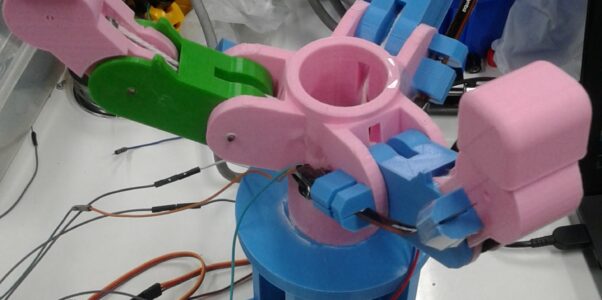
Evaluation (System Performance)
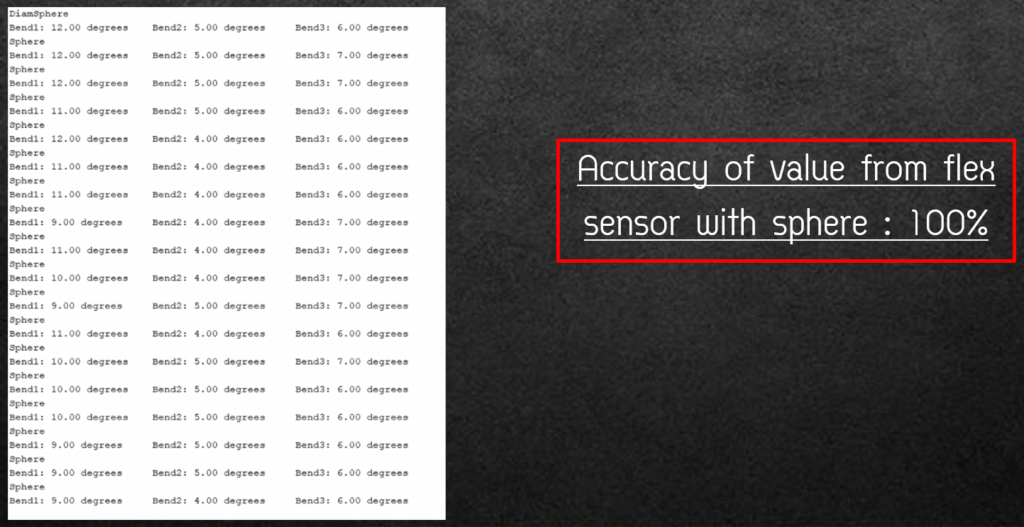
Sphere
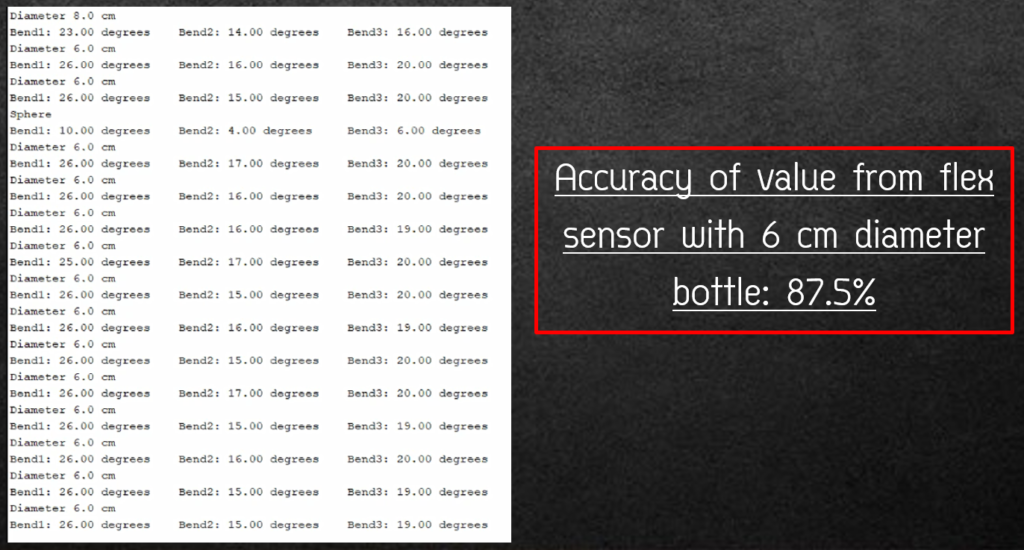
6 cm Bottle
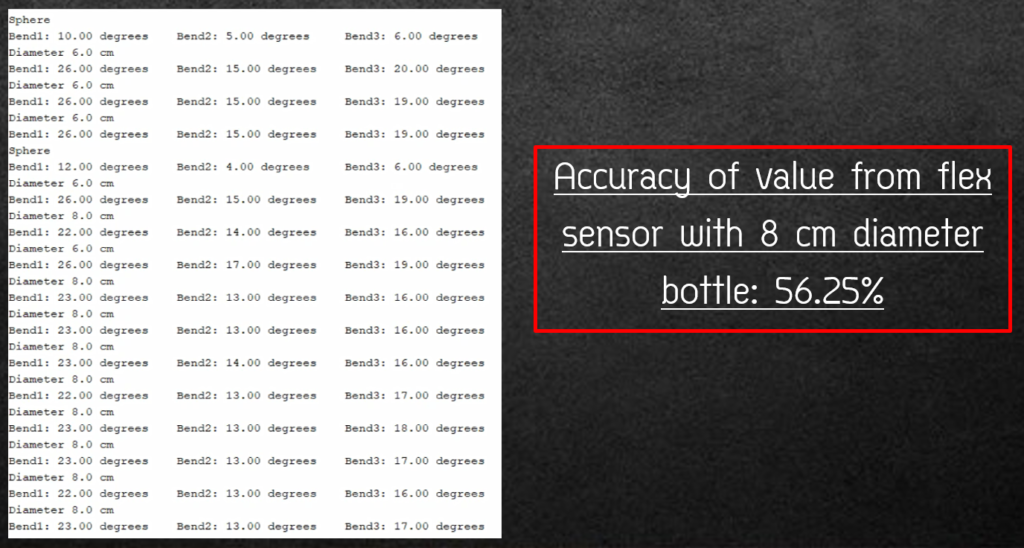
8 cm Bottle
Conclude and Suggestion
| The problem of the project | How to fix the problem |
|---|---|
| We can’t control a degree of servo motors. | Use spring to decrease the rotation of servo motors. |
| This robot hand is hard to use. | Make the human-robot hand. |
| We can’t identify an object that has a nearby diameter. | Make a clustering. |