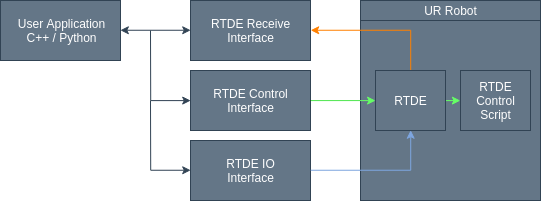
ur_rtde คือ Software library ที่ใช้สำหรับการ interface กับ universal robotโดยจะมี function หลักคือ Control interface, Receive interface, IO interface
Control interface ใช้สำหรับการควบคุมระบบต่างๆยกตัวอย่างเช่นการเคลื่อนที่
example python code
import rtde_control
rtde_c = rtde_control.RTDEControlInterface("127.0.0.1")
rtde_c.moveJ([qbase, qshouder, qelbow, qwrist1, qwrist2, qwrist3], speed, acceleration)
rtde_c.moveJ_IK([pos x, pos y, pos z, Rx, Ry, Rz], speed, acceleration)Receive interface ใช้สำหรับการรับค่ากลับจาก Universal Robot ยกตัวอย่างเช่นการรับค่า joint position หรือการรับค่า TCPpose
example python code
import rtde_receive
rtde_r = rtde_receive.RTDEReceiveInterface("127.0.0.1")
actual_q = rtde_r.getActualQ()
actual_TCPpose = rtde_r.getActualTCPPose()IO interface ใช้ในการ setting digital/analog input-output
example python code
import rtde_io
rtde_io = rtde_io.RTDEIOInterface("127.0.0.1")
rtde_io.setStandardDigitalOut(7, True)Robotiq Gripper วิธีการควบคุม gripper ด้วย python สามารถทำได้จากการใช้ preamble script และใช้ robotiq_gripper_control ในการ interface
example python code
from robotiq_gripper_control import RobotiqGripper
from rtde_control import RTDEControlInterface
import time
rtde_c = RTDEControlInterface("<ROBOT_IP>")
gripper = RobotiqGripper(rtde_c)
# Activate the gripper and initialize force and speed
gripper.activate() # returns to previous position after activation
gripper.set_force(50) # from 0 to 100 %
gripper.set_speed(100) # from 0 to 100 %
# Perform some gripper actions
gripper.open()
gripper.close()
time.sleep(1)
gripper.open()
gripper.move(10) # mm
# Stop the rtde control script
rtde_c.stopRobot()จากบทความข้างต้นจะเห็นได้ว่าเราจะสามารถ interface Universal Robot โดยใช้ python code ด้วยการใช้ library ur_rtdeได้และยังสามารถนำไปประยุกต์ใช้ในการควบคุม Universal Robot เพื่อใช้ในงานต่างๆเช่น class project ที่เป็น TeleManipulation of Robot Hand using Human Gesture
อ้างอิง: Examples — ur_rtde 1.5.5 documentation (sdurobotics.gitlab.io))