สวัสดีครับ วันนี้จะมาแบ่งปันความรู้ที่ได้รับจากการทำโปรเจ็คในวิชา Computer programming for robotics กันครับ
ก่อนอื่นเลยโจทย์ที่ได้รับคือ
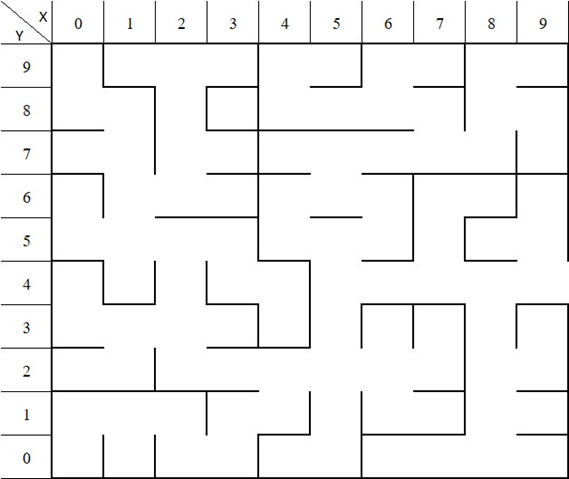
- หุ่นยนต์สี่ล้อสำรวจเส้นทางเข้าวงกตโดยเดินทางสำรวจแผนที่ในรอบแรก
- หุ่นยนต์ตัวเดิมจะนำแผนที่มาคำนวณเพื่อหาทางออกที่ดีที่สุด
Project ของรายวิชานี้เน้นที่การคิดเชิงอัลกอริทึมและการเขียนโปรแกรม นักเรียนออกแบบเขาวงกต 4000×4000 mm. ที่เรียบง่าย
- เรียนรู้วิธีวิเคราะห์ปัญหาอย่างเป็นระบบเพื่อให้อัลกอริทึมได้รับมาเพื่อแก้ปัญหา
- เรียนรู้เกี่ยวกับการใช้อัลกอริธึมดังกล่าวเพื่อแก้ปัญหาจริง
- เรียนรู้เกี่ยวกับแอปพลิเคชันของอัลกอริทึมดังกล่าวเพื่อเริ่มต้นกับโลกของอัลกอริทึมหุ่นยนต์ ปัญญาประดิษฐ์ และอื่นๆ
Algorithm ที่ใช้
Dept First search เป็น Algorithm หลักที่ใช้ในการหาเส้นทางที่ดีที่สุด โดยหลักการที่นำมาใช้เป็นดังนี้
1.สำรวจเส้นทางโดยรวมโดยใช้หลักการให้ robot วิ่งโดยมีการเรียงลำดับความสำคัญดังนี้
- ถ้าเจอซ้าย ให้ไปซ้าย
- ถ้าไม่มีซ้าย ให้ตรง
- ถ้าไม่มีตรง ให้เลี้ยวขวา
- ถ้าไม่สามารถไปไหนได้ ให้กลับรถ
ในขณะที่เดินสำรวจเส้นทาง จะมีการเก็บค่า coordinate (x, y) ไว้ในทุกๆการเดินไปช่องต่อไป
โดยตัวแปรที่ใช้ในการเก็บค่าเส้นทาง เราจะใช้ array 2 มิติในการเก็บ โดยมีสองตัวแปรคือ
visited: เป็น array ตัวแรกที่เก็บ coordinate ทั้งหมดที่หุ่นยนต์เดินผ่าน
stack: เป็น array ที่จะเก็บแค่เส้นทางที่ดีที่สุด โดยทุกครั้งที่เดินผ่านเส้นทางที่ไม่ถูกต้อง (วังวน หรือทางตัน) จะมีฟังชั่นก์ที่ทำการ slice coordinate ที่เป็นเป็นเส้นทางที่ไม่ถูกต้องออก ดังนั้นเมื่อหุ่นยนต์เดินทางจนถึงเส้นชัย ตัวแปร stack สุดท้ายที่ได้จะเป็นลำดับของ coordinate ที่ดีที่สุด โดยรายละเอียดอยู่ในข้อ 2
ผลลัพธ์การเดินทางครั้งแรก
2. การนำ Stack มาใช้ในการ Solve Maze
ก่อนที่เราจะมาใช้ Stack มา Solve Maze เรามาดูวิธีจัดการของ Stack เพื่อให้ได้ Path ที่ในการ Solve Maze กันนะครับ
- ใน Array Stack จะเก็บ coordinate ที่เดินไปใน Maze
- Stack จะเช็คค่า coordinate ล่าสุดที่นำมาเก็บกับตัวก่อนหน้าทุกครั้งว่าซ้ำหรือไม่
- เมื่อเจอค่าซ้ำ Stack จะ ลบค่าล่าสุดและค่าที่อยู่ระหว่างค่าที่ซ้ำกันไว้ทั้งหมด หมายความว่า ค่าที่ซ้ำกันนั้นเปรียบเสมือน – Robot เดินกลับมาทางเดิมซึ่งเป็นทางวน หรือ ทางตัน
- ผลลัพธ์สุดท้ายของ Stack นั้นจะได้ coordinate ที่ไม่ซ้ำกันและเป็นทางออกนั้นเอง

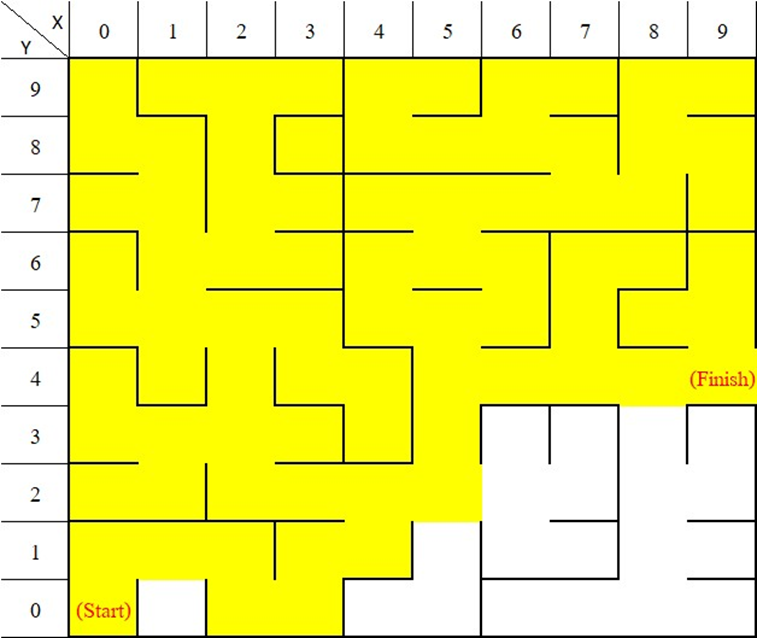
และเมื่อเรามาดูที่ Array Stack นั้น เราได้ coordinate ดังนี้
[[0,0],[0,1],[1,1],[2,1],[2,0],[3,0],[3,1],[4,1],[4,2],[5,2],[5,3],[5,4],[6,4],[7,4],[8,4],[9,4],[10,4]]
ซึ่งเมื่อนำ coordinate ต่างๆมาต่อจะได้ Path ดังนี้

สุดท้ายเมื่อได้ Path ในการ Solve Maze มาแล้ว ก็จะเหลือให้ Robot วิ่งตาม Path นี้โดยแปลงจากทิศทางปัจจุบันของ Robot และ coordinate ที่จะเดินถัดไป จะได้ sequence การทำงานของ Robot ดังนี้
[“FW”,”turn right”,”FW”,”FW”,”turn right”,”FW”,”turn left”,”FW”,”turn left”,”FW”,”turn right”, “FW”,”turn left”,”FW”,”turn right”,”FW”,”turn left”,”FW”,”FW”,”turn right”,”FW”,”FW”,”FW”,”FW”,”FW”]
ซึ่งจะเป็น sequence ให้ Robot ทำตามและ Robot จะสามารถออกจาก Maze ได้
อุปกรณ์ที่ใช้



โปรแกรมที่ใช้เขียน
1. ARDUINO

2. Node-RED
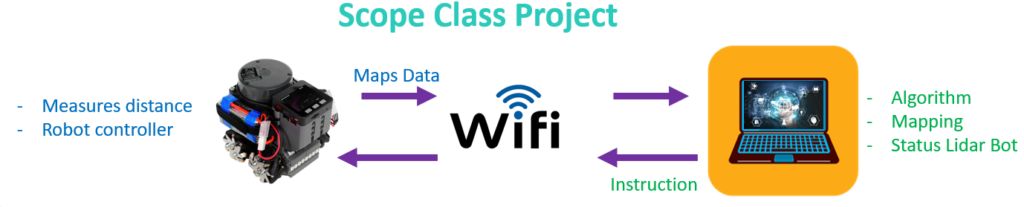
การออกแบบโปรแกรมคอมพิวเตอร์ สำหรับควบคุมหุ่นยนต์ จะแบ่งออกเป็น 3 ส่วนหลัก คือ
1. Explore Maze ส่วนการรับข้อมูลจากหุ่นยนต์ว่ามีกำแพงที่ด้านซ้าย หน้า ขวา และสีกำแพง
2. Logic Stack ส่วนการเลือกเส้นทางที่ใกล้ที่สุดและไม่มีทางตันเพื่อหาทางออก แบบการเช็ค Array ซ้ำ
3.Solution Maze ส่วนการสั่งงานหุ่นยนต์ให้เดินไปตามเส้นทางที่ได้ solve
โดยโปรแกรมสามารถสั่งงานและ Simulation เพื่อจำลองการติดต่อสื่อสารระหว่างหุ่นยนต์กับคอมพิวเตอร์ที่ลงโปรแกรม Solve Maze ไว้
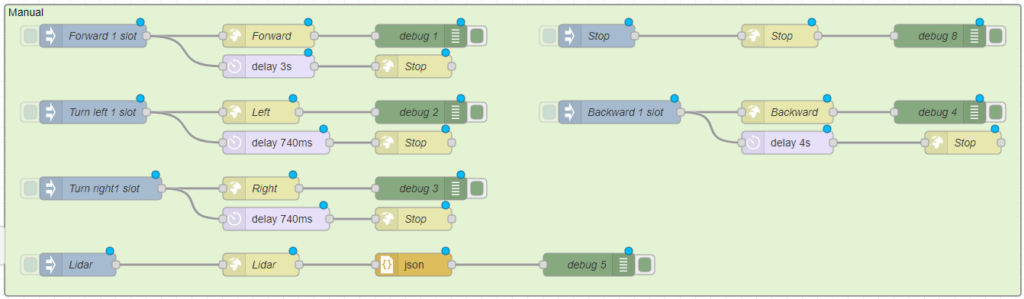
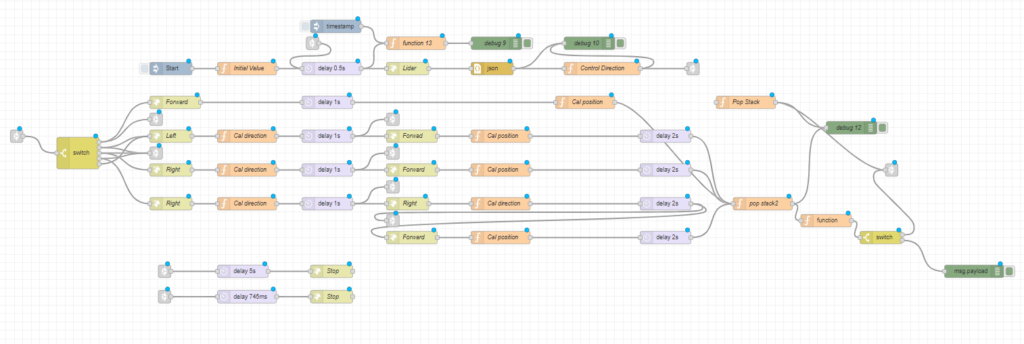
Flow chart Movement + Connection


CODE ที่ใช้ในการ SOLVE MAZE
Main Code – ARDUINO
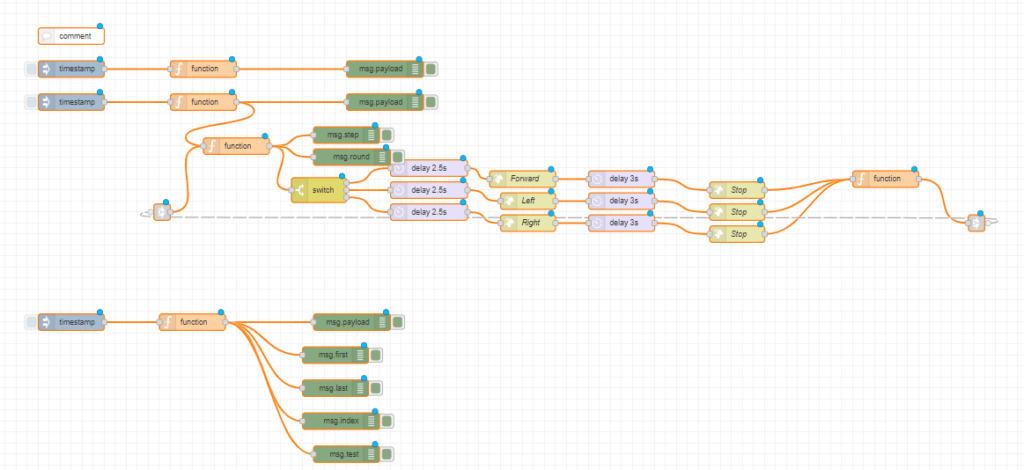
Example Code – Note-Red
VIDEO
Source Code
https://drive.google.com/drive/folders/1iYWAar2cI6nR4LiLslfvnSqvGdSeK_gg?usp=share_link
Member Group