

สวัสดีครับ ผม นายภูวเดช บัวผุด มาจากโครงการ 2B-KMUTT รุ่นที่ 18 กลุ่มวิจัย หุ่นยนต์เเละระบบอัตโนมัติ ใน Blog นี้จะเป็นการบันทึกการปฏิบัติงานประจําวันตลอดโครงงานวิจัยตลอด 2 สัปดาห์ วันจันทร์ที่ 25 มีนาคม พ.ศ.2567 จนถึง วันศุกร์ที่ 5 มีนาคม พ.ศ.2567

วันจันทร์ ที่ 25 มีนาคม พ.ศ.2567

วันนี้เป็นวันเเรกที่ผมได้เข้ามาที่ Lab ของ FIBO หรือ สถาบันวิทยาการหุ่นยนต์ภาคสนาม ได้เจอกับ อาจารย์ สยาม เเละพี่ๆนักวิจัยของ HCI LAB พวกเราได้จับกลุ่มวิจัยกันทั้งหมด 7 คน โดยมีพี่ๆช่วยคิดไอเดีย หัวข้อการวิจัย ซึ่งผลออกมาว่ากลุ่มของเราจะทําเป็นงานวิจัยในหัวข้อ การควบคุมหุ่นยนต์จากระยะไกลโดยใช้ Meta Quest II ควบคู่ไปกับ HTC Vive Tracker เพื่อใช้ในโรงพยาบาล โดยในส่วนนี้ผลรับผิดชอบส่วนของหุ่นยนต์เเละการออกเเบบด้านโครงสร้าง
วันอังคาร ที่ 26 มีนาคม พ.ศ.2567
ร่วมวางเเผนเพื่อทำโปรเจกหุ่นยนต์ส่งยา ในส่วนของ Phase I เเละ Phase II โดยมีรายละเอียดคือ Phase I เกี่ยวกับการเคลื่อนที่ของหุ่นยนต์

Phase II เกี่ยวกับระบบการจัดส่งยาให้ผู้ป่วย
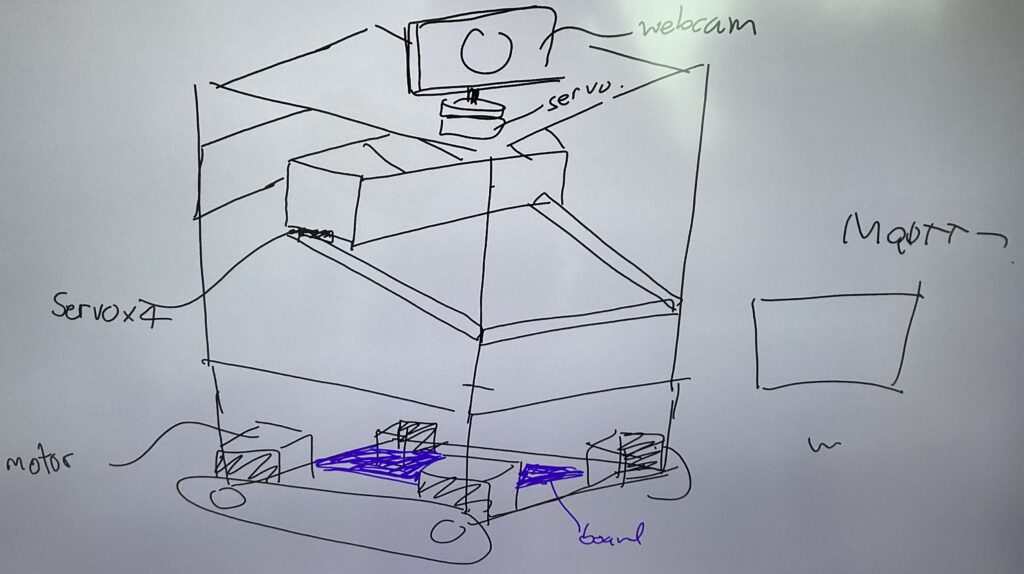
ผมอยู่ในส่วนการวางเเผน Phase II เรื่องการจัดส่งยา ซึ่งได้ทำการนำเสนอการจัดส่งยาในหลายๆเเบบ ซึ่งได้เลือกการจัดส่งยาโดยใช้พื้นเอียง เเละกล่องใส่ยาที่ใช้กลไกลของ servo ในการปล่อยยาให้หล่นลงมาตามพื้นเอียง
วันพุธ ที่ 27 มีนาคม พ.ศ.2567

ทางทีม Design เเละ Mechanic ได้สร้างตัว Prototype ของหุ่นยนต์เรา ซึ่งมีหัวใจหลักเป็นบอร์ด Raspberry Pi 4
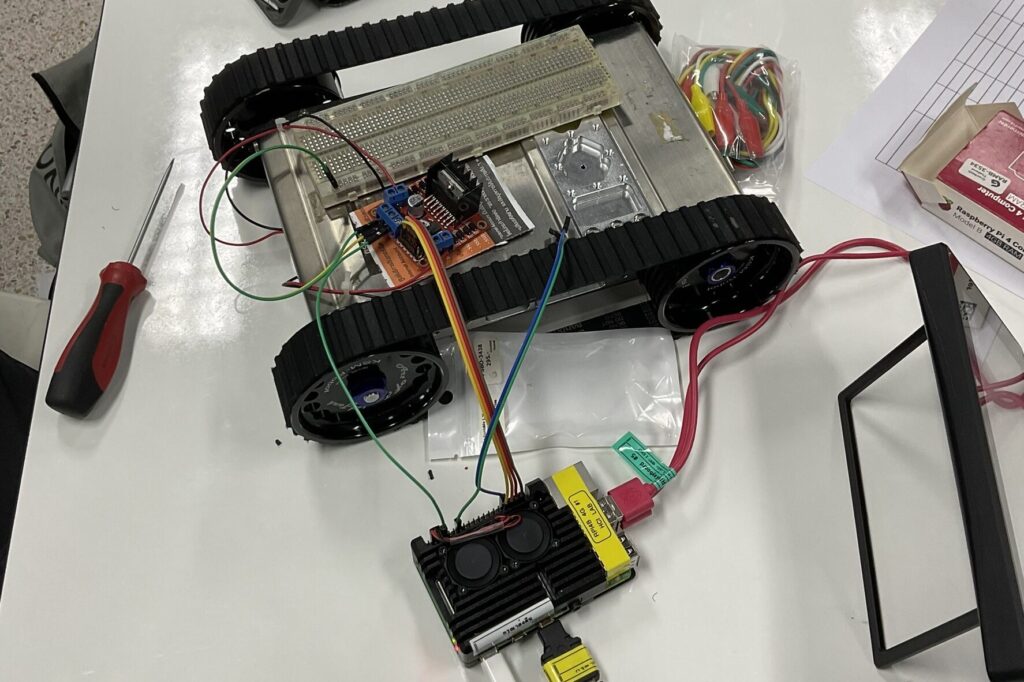
ในวันนี้ผมได้อยู่ในส่วนของพัฒนาเเละเขียน Code ผ่าน Raspberry pi เพื่อควบคุมการเคลื่อนที่เเละออกเเบบ 3D model สำหรับควบคุมการขยับของ servo ที่ควบคุม webcam
วันพฤหัสบดี ที่ 28 มีนาคม พ.ศ.2567
RASPBERRY PI : เก็บรายละเอียดของ 3D ที่จะไปเชื่อม webcam กับ servo
ARDUINO : เปลี่ยนมาใช้ Arduino ในการบังคับ servo ที่ webcam
VR : ทดสอบ VR , เปิด VR
UNITY : เชื่อม VR เข้ากับ Unity
วันศุกร์ ที่ 29 มีนาคม พ.ศ.2567
RASPBERRY PI : พยายามเชื่อมต่อ arduino กับ WebRTC
ARDUINO : ควบคุมการหมุนของล้อ ซ้าย ขวา หน้า หลัง
VR : หาวิธีติดตั้ง tracking เข้ากับโปรเเกรม Unity
UNITY : วางเเกนต่างๆ เพื่อใช้ในการคำนวณ x-y-z
วันจันทร์ ที่ 1 เมษายน พ.ศ.2567
RASPBERRY PI : วางระบบ tracking ของ VR
ARDUINO : ศึกษาเเละทำระบบ MQTT , sketch 3D print เพื่อปริ้นท์เป็นตัวยึด webcam
UNITY : เก็บค่าการหมุนจาก VR ที่บริเวณหัวให้รับค่ามาเป็นองศาต่างๆ
วันอังคาร ที่ 2 เมษายน พ.ศ.2567
RASPBERRY PI : โหลด OBS เพื่อเเคปเจอหน้าจอไปใช้ในการส่งภาพเข้า webcam
VR : เทสระบบ tracking
UNITY : ปรับปรุงการหันซ้ายขวาให้ดียิ่งขึ้น
วันพุธ ที่ 3 เมษายน พ.ศ.2567
RASPBERRY PI : เเก้บัคต่างๆ , พยายามนำภาพจาก webcam ขึ้นสู่ websever , ปรับ frame rate ของ video
ARDUINO : ปรับการอัตราการรับค่าให้ลดลงจาก 3600 ข้อความต่อวินาที ให้ลดลง
VR : เปลี่ยนระบบการหมุนของ webcam จากการใช้ VR มาเป็น การใช้ที่บังคับมือ ในการควบคุม rotation
UNITY : เชื่อมต่อ webserver กับ VR
วันพฤหัสบดี ที่ 4 เมษายน พ.ศ.2567