
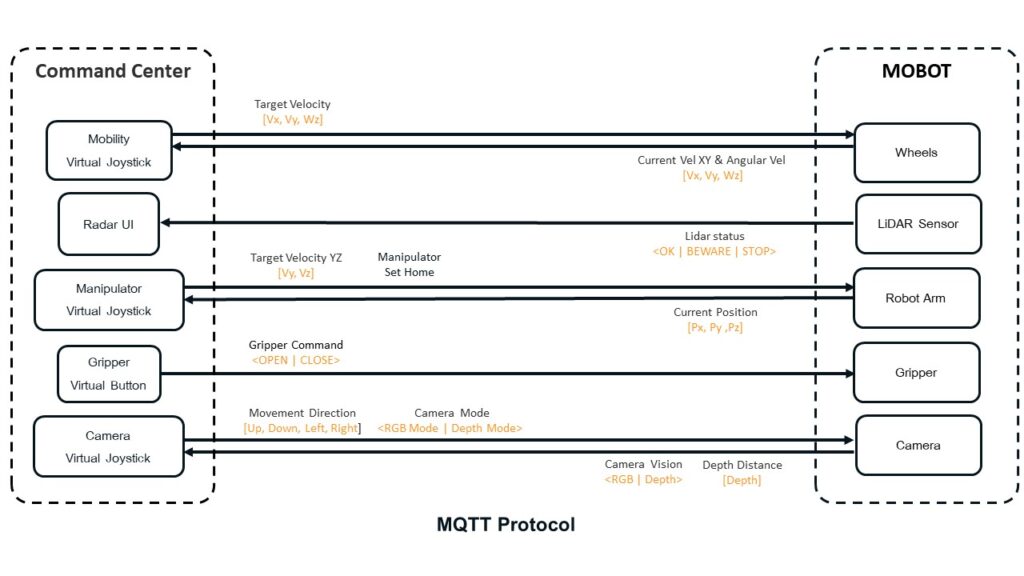
ในส่วนนี้จะเป็นการอธิบายการรับส่งข้อมูลทั้งหมดของระบบหุ่นยนต์ META MOBOT ผ่าน MQTT โดย MQTT จะเป็นโปรโตคอลสำหรับใช้ส่งข้อความระหว่างอุปกรณ์ โดยใช้โมเดลเน็ตเวิร์คแบบ publish-subscribe ซึ่งการรับส่งข้อมูลจะเกิดขึ้นได้นั้นจะต้องมีผู้ส่ง (publisher) ส่งข้อมูลไปที่ MQTT Broker โดยใช้ topic ชื่อหนึ่ง และทางผู้รับ (subscriber) จะทำการเชื่อมต่อไปยัง MQTT Broker เพื่อ subscribe ชื่อ topic ที่ทางผู้ส่งได้ทำการส่งข้อมูลมา
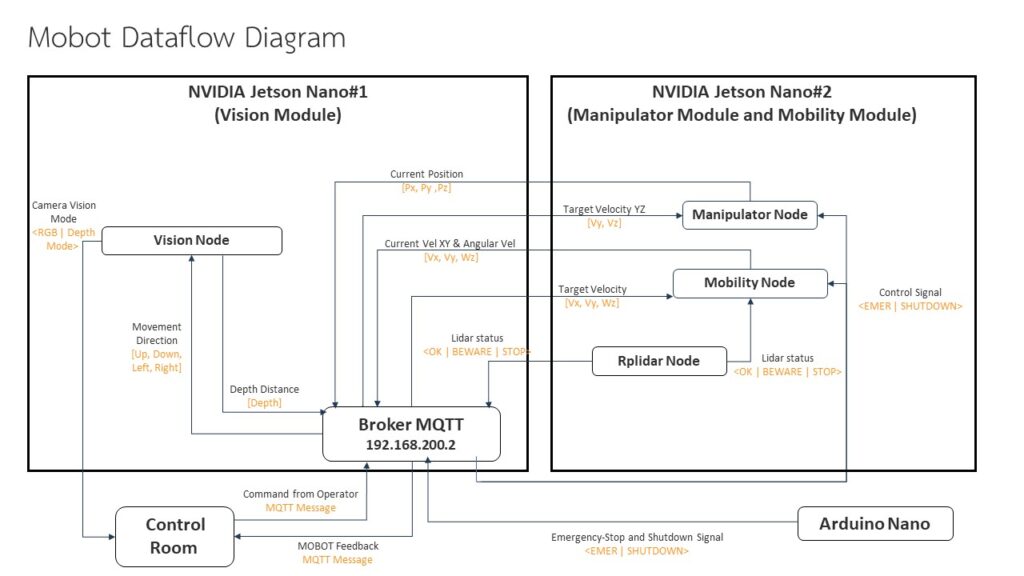
ในส่วนของ Node Program ของหุ่นยนต์ทั้งหมดจะถูกเขียนลงในหน่วยประมวลผล Jetson Nano โดยในส่วนของ Vision Control และตัวของ Broker MQTT ฝั่งหุ่นยนต์จะอยู่ใน Jetson Nano ตัวที่ 1 และในส่วนของ Mobility, Manipulation, Lidar Detection จะอยู่ใน Jetson Nano ตัวที่ 2 โดยในส่วนของ Jetson Nano ตัวที่ 1 จะมี Broker MQTT ฝั่งหุ่นยนต์ ที่จะเป็นตัวกลางในการสื่อสารระหว่าง Node Program ทั้งหมดภายในหุ่นยนต์
โดยจะมี Broker ทางฝั่งของ User ที่จะสามารถส่งคำสั่งและรับค่า Feedback ต่างๆ จากตัวหุ่นยนต์ ผ่านการเชื่อม MQTT Brigde กับตัว Broker MQTT ฝั่งหุ่นยนต์