การสั่งงานการเคลื่อนที่ของหุ่นยนต์โดยใช้การควบคุมผ่านระบบไอโอที
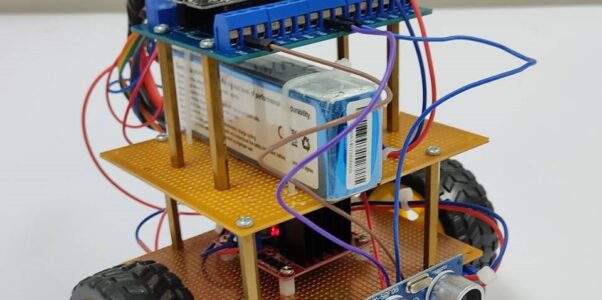
ผู้จัดทำ ที่มาและความสำคัญ : ปัจจุบันระบบไอโอทีมีการพัฒนาและเติบโตในการใช้งานเป็นไปด้วยความรวดเร็วและวงกว้าง ส่งผลให้เทคโนโลยีหลายๆ อย่างมีระบบไอโอทีเป็นส่วนประกอบ ดังนั้นทางทีมผู้จัดทำจึงมีความต้องการศึกษาการสื่อสารผ่านระบบไอโอทีเพื่อนำมาประยุกต์ใช้กับการควบคุมหุ่นยนต์ในการเคลื่อนที่และรับสัญญาณจากเซนเซอร์เพื่อมาแสดงผลผ่าน Dashboard วัตถุประสงค์ : 1.ศึกษาการสื่อสารผ่านระบบไอโอทีเพื่อนำมาประยุกต์ใช้กับการควบคุมการเคลื่อนที่ของหุ่นยนต์ 2.ศึกษาการรับค่าจาก sensor และส่งค่าผ่านระบบไอโอทีเพื่อนำมาสร้าง Dashboard ในการแสดงผล หลักการทำงานของ MQTT จะประกอบไปด้วย 3 ส่วน MQTT Broker ทำหน้าที่เป็นคนกลาง โดยรับข้อมูลว่าใครจะเป็น Publisher เพื่อส่งข้อมูลใดๆ หรือรับข้อมูลว่าใครจะเป็น Subscriber เพื่อสมัครรับข้อมูลใดๆ โดยตัว Broker จะ forward ข้อมูลไปให้อุปกรณ์ต่างๆ …