UR3e teleoperation with Occulus quest2
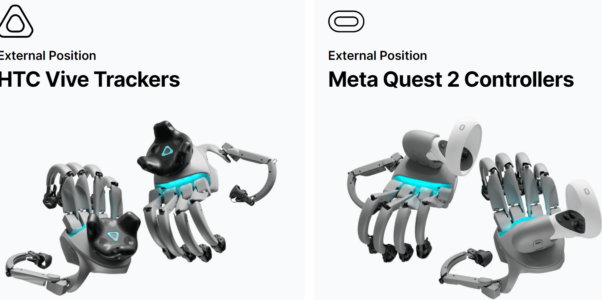
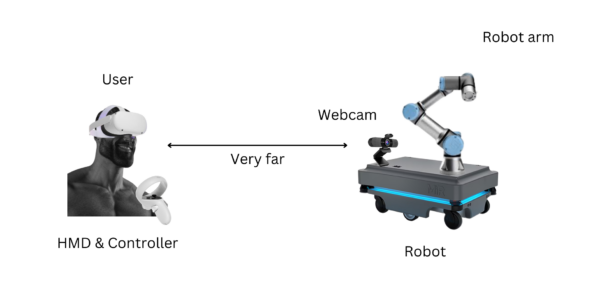
Team member นายจรัญวัฒน์ บัวศรี 63340500005 Objective โปรเจคนี้มีจุประสงค์ในการควบคุมแขนหุ่นยนต์แบบ realtime ตามการขยับแขนของผู้ใช้ เพื่อใช้ในสถานการณ์ที่ต้องการความสามารถที่ตัดสินใจแบบมนุษย์แต่แม่นยำแบบเครื่องจักร ยกตัวอย่างเช่น การผ่าตัด การซ่อมแซมจากระยะไกลที่มนุษย์เข้าถึงไมได้ โดยการควบคุมแขนของหุ่นยนต์จะให้ผู้ใช้สวมใส่ Occulus quest 2 ซึ่งเป็นแว่น VR และควบคุมตำแหน่งและทิศทางของปลายแขนด้วยโดยใช้คอนโทลเลอ System scenario ผู้ใช้จะสวมใส่แว่น VR และรับภาพที่ stream มาจากกล้องที่ติดอยู่กับหุ่นยนต์ โดยข้อมูลที่รับส่งจากแว่น VR ไปยังหุ่นยนต์จะใช้ ROS-TCP connector เนื่องจากแว่น VR ไม่ระบบ …