ในการออกแบบโครงสร้างอาคารนั้นจะต้องคำนึงถึง การใช้งาน รูปแบบที่เป็นเอกลักษ์ และที่สำคัญที่สุดก็คือความปลอดภัยของโครงสร้างที่จะคอยรับมือกับเหตุการณ์ที่ไม่คาดคิดต่าง ๆ
ในงานทางด้านสถาปัตยกรรมการออกแบบโครงสร้างนั้นจะต้องได้รับการทดสอบว่ามีความทนทานต่อเหตุการณ์แผ่นดินไหวหรือไม่
ผู้จัดทำจึงได้คิดที่จะศึกษาและพัฒนาโปรแกรมที่สามารถออกแบบและจำลองการเกิดแผ่นดินไหวได้
สมาชิกผู้จัดทำ
- นายธนภัทร อัศวนภานนท์ โรงเรียนกรุงเทพคริสเตียน
- นายสายฟ้า มีทอง โรงเรียนกรุงเทพคริสเตียน
วัตถุประสงค์
- เพื่อเป็นสื่อการเรียนการสอนในภาควิชาสถาปัตยกรรม ในการจำลองโครงสร้างพื้นฐานต่างๆ ในสถานการณ์แผ่นดินไหว
- ใช้เป็นสื่อการสอนพื้นฐานสำหรับเยาวชนที่สนใจในเรื่องโครงสร้างและการออกแบบอาคารได้ทดลองและศึกษาผ่านทางโปรแกรม
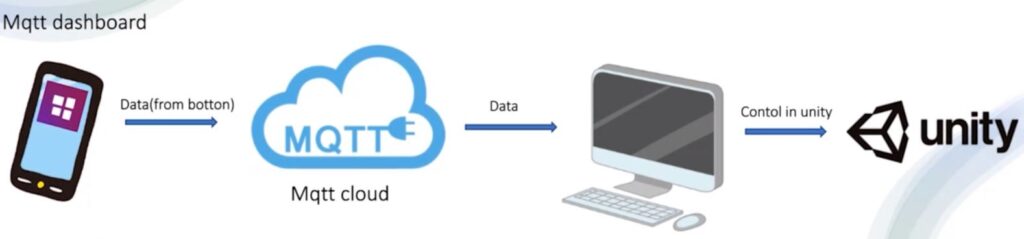
ภาพรวมของการทำงาน
ใช้ MQTT Dashboard ส่งข้อมูลไปที่ MQTT cloud และส่งต่อไปยังคอมพิวเตอร์เพื่อควบคุมโปรแกรม Unity
การนำเสนอผลการออกแบบ
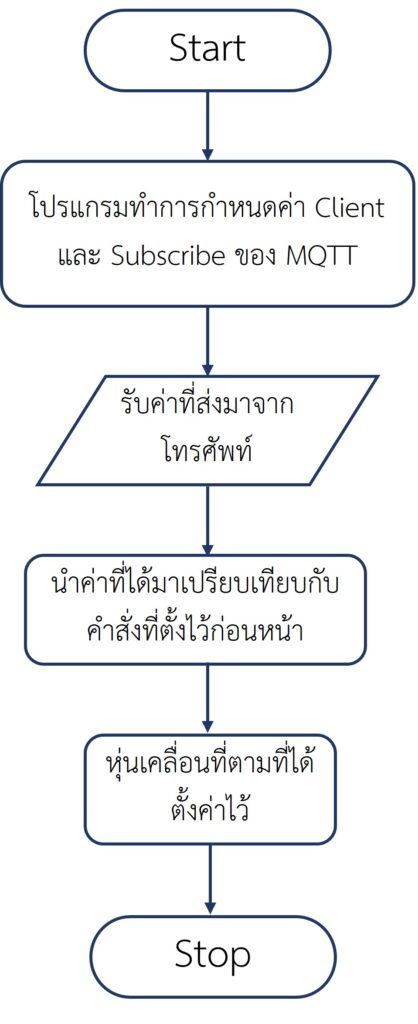
- Flow Chart ของระบบ
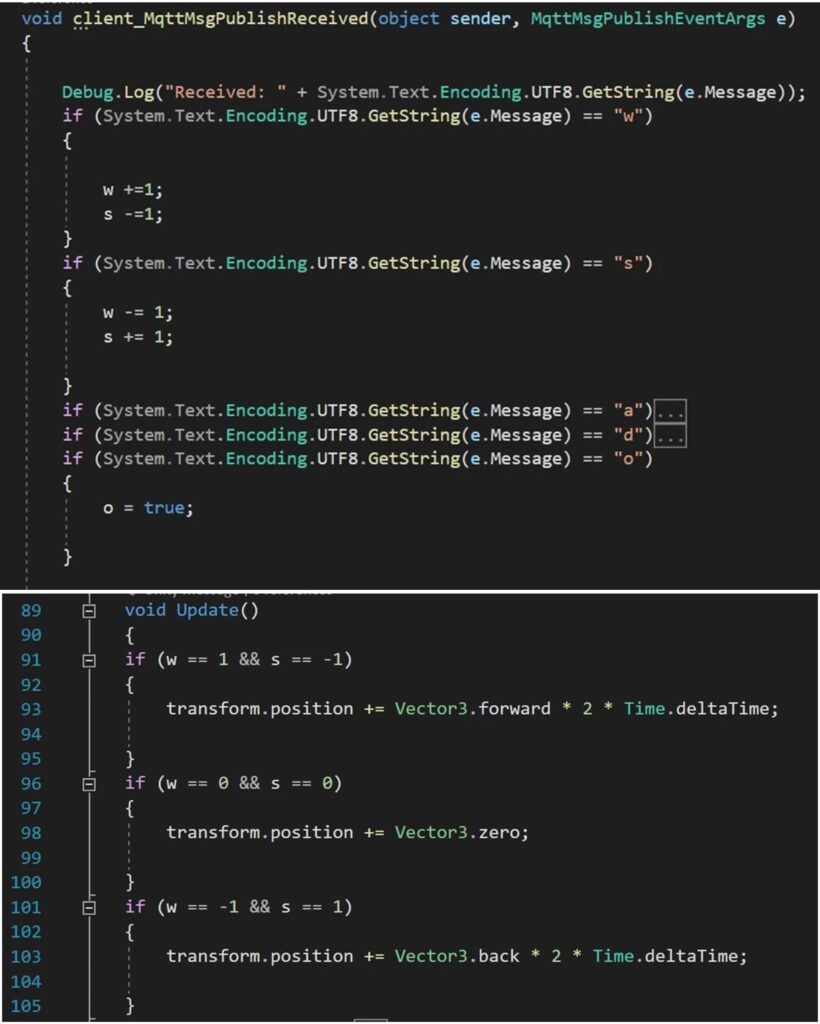
- ตัวอย่างโค้ดที่ใช้เขียน
ผลการทดลอง
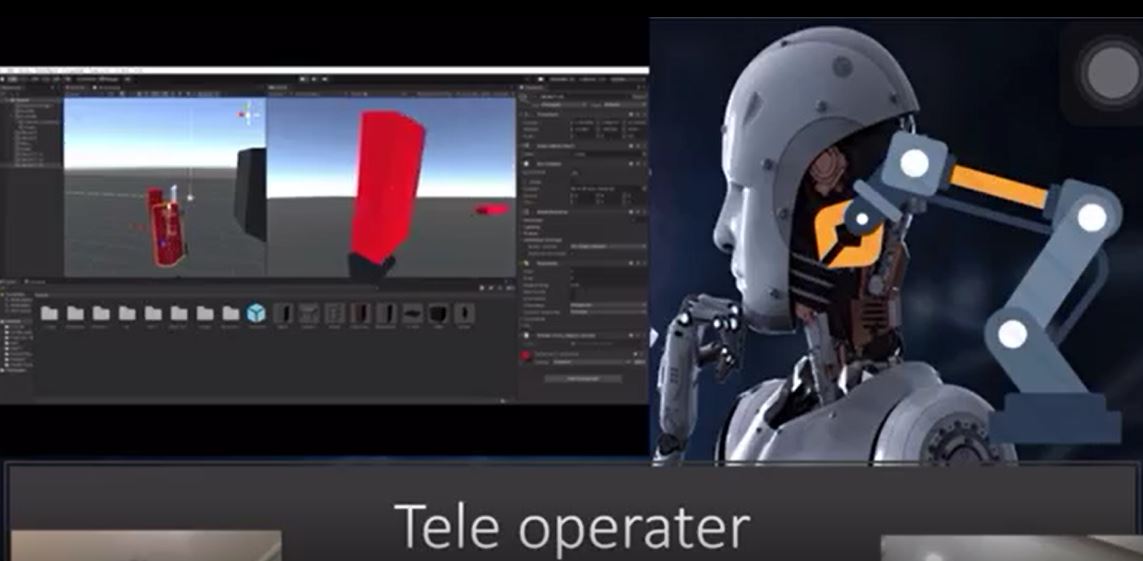
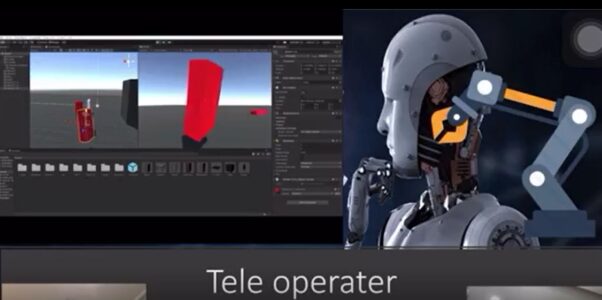
- Tele Operator
0:000:00
ได้สร้างแบบจำลอง Tele Robot ขึ้นมาซึ่งมีความสามารถที่จะหยิบจับสิ่งของตามแนวแกน X,Y และใช้สร้างโครงสร้างที่จะจำลองเพื่อทดสอบเหตการณ์แผ่นดินไหว
- โปรแกรมจำลองการเกิดแผ่นดินไหว
0:000:00
โปรแกรมจำลองแผ่นดินไหว โดยอ้างอิงค่ามาจากเหตุการณ์จริง และสามารถปรับแต่งลักษณะของแผ่นดินไหวได้ถึง 3 ลักษณะ คือ Rand amount , Shake speed และ Magnitude
สรุปและข้อเสนอแนะ
- เกิดปัญหาเรื่องของเวลาที่จำกัดทำให้ไม่สามารถพัฒนาโปรแกรมได้เต็มที่
- ปรับปรุง MQTT ให้สามารถหยิบจับสิ่งของและสามารถควบคุมได้ตามที่ต้องการ
- ปรับปรุงให้ในการเล่น 1 ครั้งสามารถควบคุมหุ่นยนต์ได้หลายตัว
- ปรับปรุง Animation ของหุ่นยนต์ให้ดูเสมือนจริงมากขึ้น
- ปรับปรุงให้โปรแกรมของแผ่นดินไหวมีความเสถียรมากขึ้น